resurgance2001
- 197
- 9
- Homework Statement
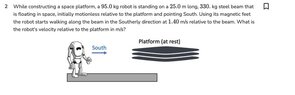
- While constructing a space platform, a 95.0 kg robot is standing on a 25.0 m long, 330. kg steel beam that is floating in space, initially motionless relative to the platform and pointing towards the platform which is not attached. Using its magnetic feet the robot starts walking along the beam in the direction of the platform at 1.40 m/s relative to the beam. What is the robot's velocity relative to the platform in m/s?
- Relevant Equations
- Conservation of momentum.
The momentum of the robot is 95.0 x 1.4 m/s towards the platform. This must be equal and opposite to the momentum imparted to the beam. Dividing 133 kg m/s by 330.0 Kg gives a velocity of 0.403 m/s for the beam. So the relative velocity of the robot relative to the platform is 1.40 - 0.403 = 0.997 m/s. But the computer says this is the wrong answer! Have I missed something? Thanks in advance for any suggestions.