ardentmed
- 158
- 0
Hey guys,
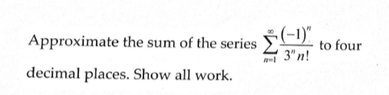
I just wanted to run a quick series question by you guys just to confirm my answer. I'm doubting whether or not I should keep going or if S6 is enough.
View attachment 2804
I got S5 = -0.28347 and S6 = -0.28347, so that is where I concluded than Sn ~ -0.2835.
I would appreciate it if someone could look over this for me and tell me how I did.
Thanks in advance.
I just wanted to run a quick series question by you guys just to confirm my answer. I'm doubting whether or not I should keep going or if S6 is enough.
View attachment 2804
I got S5 = -0.28347 and S6 = -0.28347, so that is where I concluded than Sn ~ -0.2835.
I would appreciate it if someone could look over this for me and tell me how I did.
Thanks in advance.