mathdad
- 1,280
- 0
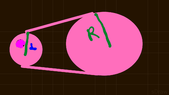
Let r = radius
See picture.
If r = 6 cm, R = 10 cm, and the angular speed of the larger wheel is 100 rpm, determine the angular speed of the smaller wheel in radians per minute.
Again, 1 revolution = 2 pi radians.
I need to use w = θ/t.
So, θ = 100 rpm • 2 pi radians.
θ = 200 pi radians
w = 200 pi radians/min, which is my answer.
At this point, I doubted that my answer is right because it did not take long to find w or omega representing the angular speed.
The book's answer is 1000/3 radians/min.
What did I forget to do?
View attachment 7910
See picture.
If r = 6 cm, R = 10 cm, and the angular speed of the larger wheel is 100 rpm, determine the angular speed of the smaller wheel in radians per minute.
Again, 1 revolution = 2 pi radians.
I need to use w = θ/t.
So, θ = 100 rpm • 2 pi radians.
θ = 200 pi radians
w = 200 pi radians/min, which is my answer.
At this point, I doubted that my answer is right because it did not take long to find w or omega representing the angular speed.
The book's answer is 1000/3 radians/min.
What did I forget to do?
View attachment 7910