Vanilla Gorilla
- 78
- 24
- TL;DR
- What is the most general possible way to compute the Hodge Star? If possible, please provide an example of calculation with p,d<3, and d>p.
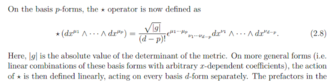
I have been learning a little Differential Geometry lately and recently came across the Hodge Star. So far I have been unable to find an explanation for its calculation that I can understand. I believe some ways of computing it were only valid in an orthonormal basis, but I would like to be able to compute it in a general basis. So far, the closest I have come to being able to understand, and then calculate it has been from this source, on pages 3-5 (See attached image).
The main problems I have with this computation are twofold. For one, I am unfamiliar with how to efficiently calculate the Levi-Civita Symbol. I think I understand the definitions of even and odd permutations, but I don't understand how I can efficiently tell whether a given permutation is odd or even without manually swapping scripts. Likewise, I have never seen the Levi-Civita Symbol with both sub- and super-scripts before.
Second, I again think that I roughly understand Einstein Notation in a basic sense (I.e., simple examples), but I don't really understand the use of it here, and how to conduct the summations.
Here is an example I tried to calculate below.
Write ## \large dx^1 \wedge ... \wedge dx^P=dx^{1...P}## for brevity.
Suppose we have ## \large \alpha = 7 dx^{123} + 5 dx^{132} + 8 dx^{321}. ## Obviously, this is a 3-form. Let's suppose we're on a 7-dimensional pseudo-Riemannian manifold. Assume we're in Cartesian, so the determinant of the absolute value of the Metric, ##\large \sqrt {|g|}## is 1. Rewrite ## \large \alpha## in Einstein notation; I'm omitting terms with values of 0 for brevity. Also, I use the function ##p(n_1,n_2,n_3...,n_b) ## to denote all possible permutations of the list ##n_1,n_2,n_3...,n_b##. For example, ## \large p(1,2,3) = {123, 132, 213, 231, 312, 321}##.
$$\begin{gather*} \star (dx^{\mu_1} \wedge … \wedge dx^{\mu_p} ) = \frac {\sqrt {|g|}} {(d-p)!} \epsilon^{\mu_1…\mu_p}_{\nu_1…\nu_{d-p}} dx^{\nu_1} \wedge … \wedge dx^{\nu_{d-p}} ~~~~~~~ \text {(See original source)} \\ \star (dx^{\mu_1 ... \mu_p} ) = \frac {\sqrt {|g|}} {(d-p)!} \epsilon^{\mu_1…\mu_p}_{\nu_1…\nu_{d-p}} dx^{\nu_1 ... \nu_{d-p}} \\
\star (dx^{\mu_1 ... \mu_3} ) = \frac {1} {(7-3)!} \epsilon^{\mu_1…\mu_3}_{\nu_1…\nu_{7-3}} dx^{\nu_1 ... \nu_{7-3}} \\
\star (dx^{\mu_1 \mu_2 \mu_3} ) = \frac {1} {24} \epsilon^{\mu_1 \mu_2 \mu_3 }_{\nu_1 \nu_2 \nu_3 \nu_4 } dx^{\nu_1 \nu_2 \nu_3 \nu_4 } \\
\star (dx^{p(1,2,3)} ) = \frac {1} {24} \epsilon^{ p(1,2,3) }_{ p(1,2,3,4) } dx^{ p(1,2,3,4) } \\
\end{gather*} $$
Then I get lost.
I have also tried the formula ## \large \alpha \wedge \star \beta = \langle \alpha, \beta \rangle \omega##, as shown below, where we solve for ##\large \beta##, for any ##\large \alpha##, ##\large \omega## is the volume form ##\large \omega=\sqrt {|g|} dx^{0...d-1}##, and ##\large \langle \alpha, \beta \rangle=\alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p}##, again, all according to the same source.
$$\begin{gather*} \alpha \wedge \star \beta = \langle \alpha, \beta \rangle \omega \\
\alpha \wedge \star \beta = \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \left [ \sqrt {|g|} dx^{0...d-1} \right ] \\
\text {By linearity, we move scalars to the front:} ~~~ \alpha \wedge \star \beta = \left ( \sqrt {|g|} \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \right ) \left [ dx^{0...d-1} \right ] \\
\text {Rewriting the notation, but keeping the same meaning of the expression:} ~~~ \alpha \wedge \star \beta = \left ( \sqrt {|g|} \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \right ) \left [ dx^{1...d} \right ] \\
\alpha \wedge \star \beta = \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \left [ dx^{1...d} \right ] \\
\end{gather*}
$$
Then I again get lost.
I don't know if I did everything, or even anything, right in the above examples, but I just wanted to share them so my issues might be more apparent.
I think I can be taught able to use either of these methods, but I just need to see an example. There seems to be a lot of unwritten convention that I am unfamiliar with, that jeopardizes my capacity to understand.
The main problems I have with this computation are twofold. For one, I am unfamiliar with how to efficiently calculate the Levi-Civita Symbol. I think I understand the definitions of even and odd permutations, but I don't understand how I can efficiently tell whether a given permutation is odd or even without manually swapping scripts. Likewise, I have never seen the Levi-Civita Symbol with both sub- and super-scripts before.
Second, I again think that I roughly understand Einstein Notation in a basic sense (I.e., simple examples), but I don't really understand the use of it here, and how to conduct the summations.
Here is an example I tried to calculate below.
Write ## \large dx^1 \wedge ... \wedge dx^P=dx^{1...P}## for brevity.
Suppose we have ## \large \alpha = 7 dx^{123} + 5 dx^{132} + 8 dx^{321}. ## Obviously, this is a 3-form. Let's suppose we're on a 7-dimensional pseudo-Riemannian manifold. Assume we're in Cartesian, so the determinant of the absolute value of the Metric, ##\large \sqrt {|g|}## is 1. Rewrite ## \large \alpha## in Einstein notation; I'm omitting terms with values of 0 for brevity. Also, I use the function ##p(n_1,n_2,n_3...,n_b) ## to denote all possible permutations of the list ##n_1,n_2,n_3...,n_b##. For example, ## \large p(1,2,3) = {123, 132, 213, 231, 312, 321}##.
$$\begin{gather*} \star (dx^{\mu_1} \wedge … \wedge dx^{\mu_p} ) = \frac {\sqrt {|g|}} {(d-p)!} \epsilon^{\mu_1…\mu_p}_{\nu_1…\nu_{d-p}} dx^{\nu_1} \wedge … \wedge dx^{\nu_{d-p}} ~~~~~~~ \text {(See original source)} \\ \star (dx^{\mu_1 ... \mu_p} ) = \frac {\sqrt {|g|}} {(d-p)!} \epsilon^{\mu_1…\mu_p}_{\nu_1…\nu_{d-p}} dx^{\nu_1 ... \nu_{d-p}} \\
\star (dx^{\mu_1 ... \mu_3} ) = \frac {1} {(7-3)!} \epsilon^{\mu_1…\mu_3}_{\nu_1…\nu_{7-3}} dx^{\nu_1 ... \nu_{7-3}} \\
\star (dx^{\mu_1 \mu_2 \mu_3} ) = \frac {1} {24} \epsilon^{\mu_1 \mu_2 \mu_3 }_{\nu_1 \nu_2 \nu_3 \nu_4 } dx^{\nu_1 \nu_2 \nu_3 \nu_4 } \\
\star (dx^{p(1,2,3)} ) = \frac {1} {24} \epsilon^{ p(1,2,3) }_{ p(1,2,3,4) } dx^{ p(1,2,3,4) } \\
\end{gather*} $$
Then I get lost.
I have also tried the formula ## \large \alpha \wedge \star \beta = \langle \alpha, \beta \rangle \omega##, as shown below, where we solve for ##\large \beta##, for any ##\large \alpha##, ##\large \omega## is the volume form ##\large \omega=\sqrt {|g|} dx^{0...d-1}##, and ##\large \langle \alpha, \beta \rangle=\alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p}##, again, all according to the same source.
$$\begin{gather*} \alpha \wedge \star \beta = \langle \alpha, \beta \rangle \omega \\
\alpha \wedge \star \beta = \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \left [ \sqrt {|g|} dx^{0...d-1} \right ] \\
\text {By linearity, we move scalars to the front:} ~~~ \alpha \wedge \star \beta = \left ( \sqrt {|g|} \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \right ) \left [ dx^{0...d-1} \right ] \\
\text {Rewriting the notation, but keeping the same meaning of the expression:} ~~~ \alpha \wedge \star \beta = \left ( \sqrt {|g|} \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \right ) \left [ dx^{1...d} \right ] \\
\alpha \wedge \star \beta = \left [ \alpha_{\mu_1···\mu_p} \beta^{\mu_1···\mu_p} \right ] \left [ dx^{1...d} \right ] \\
\end{gather*}
$$
Then I again get lost.
I don't know if I did everything, or even anything, right in the above examples, but I just wanted to share them so my issues might be more apparent.
I think I can be taught able to use either of these methods, but I just need to see an example. There seems to be a lot of unwritten convention that I am unfamiliar with, that jeopardizes my capacity to understand.