kalish1
- 79
- 0
I am trying to visualize the following rotation of $\mathbb R^3$, but it is very difficult. I want to get the answer by intuition, and not by using the Rodrigues rotation formula or conjugation of matrices, etc.
Help please.
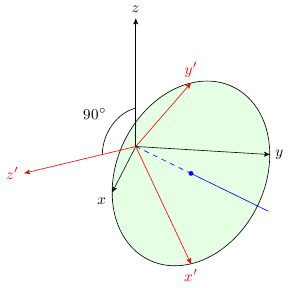
**Problem statement:** Determine the matrix that represents the following rotation of $\mathbb R^3$: an angle of $\pi/2$ about the fixed axis containing the vector $(1,1,0)^t$
Here is what I have tried in my diagram:
![Coordinate axes][1]
Should I find a 3x3 rotation matrix $A$ such that $A(1,1,0)^t=(-1,1,0)^t$?
[1]:
View attachment 1648
Help please.
**Problem statement:** Determine the matrix that represents the following rotation of $\mathbb R^3$: an angle of $\pi/2$ about the fixed axis containing the vector $(1,1,0)^t$
Here is what I have tried in my diagram:
![Coordinate axes][1]
Should I find a 3x3 rotation matrix $A$ such that $A(1,1,0)^t=(-1,1,0)^t$?
[1]:
View attachment 1648
Attachments

Last edited by a moderator: