Discussion Overview
The discussion revolves around the equations governing 6 degrees of freedom for solid body movement, specifically focusing on the complexities of rotational dynamics around the x, y, and z axes. Participants explore potential solutions, mathematical approaches, and the challenges associated with these equations.
Discussion Character
- Exploratory, Technical explanation, Debate/contested, Mathematical reasoning
Main Points Raised
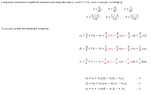
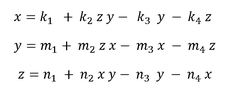
- One participant presents a system of equations related to 6 degrees of freedom and seeks assistance in solving them, expressing uncertainty due to a long absence from advanced mathematics.
- Another participant shares a Mathematica command that purportedly solves the system but notes that the solution is complex and difficult to interpret.
- A subsequent reply requests the solution, indicating that the participant has the exact values of the constants but doubts that this will simplify the solution.
- Several participants mention limitations in accessing Mathematica, with one expressing frustration over the complexity of the solution, describing it as "fugly."
- One participant concludes that the system does not appear to have an explicit solution, reflecting on the responses received.
Areas of Agreement / Disagreement
Participants generally agree on the complexity of the equations and the challenges in finding a clear solution. However, there is no consensus on whether an explicit solution exists, as some express doubt while others remain hopeful.
Contextual Notes
Limitations include the potential dependence on the specific values of constants and the unresolved nature of the mathematical steps involved in simplifying the equations.
Who May Find This Useful
Individuals interested in advanced dynamics, mathematical modeling, or those working with solid body movement in engineering contexts may find this discussion relevant.
)") ?
?