Math Amateur
Gold Member
MHB
- 3,920
- 48
I am reading Loring W.Tu's book: "An Introduction to Manifolds" (Second Edition) ...
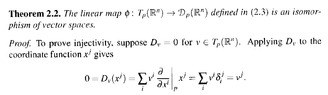
I need help in order to fully understand Theorem 2.2 and the remarks after the theorem ...Theorem 2.2 and the remarks after the theorem read as follows:View attachment 8642
View attachment 8643My questions on the above text from Tu are as follows:
Question 1
At the end of the proof of the above theorem by Tu we read the following:
" ... ... This proves that $$D = D_v$$ for $$v = \langle D x^1 / ... / ... / D x^n \rangle$$ ... ..."The above implies $$v^i = D x^i$$ ... ... but what does $$D x^i$$ mean and how exactly is it equal to $$v^i$$ ... ... ?
Question 2 In some remarks after the end of the proof of the above theorem by Tu we read the following:
" ... ... Under the vector space isomorphism $$T_p ( \mathbb{R}^n ) \simeq D_p ( \mathbb{R}^n )$$, the standard basis $$e_1 \ ... \ ... \ e_n$$ for $$T_p ( \mathbb{R}^n )$$ corresponds to the set $$\partial / \partial x^1 \mid_p \ ... \ ... \ \partial / \partial x^1 \mid_p$$ of partial derivatives. From now on, we will make this identification and write a tangent vector $$v = \langle v^1 \ ... \ ... \ v^n \rangle = \sum v^i e_i$$ as
$$v = \sum v^i \frac{ \partial }{ \partial x^i } \mid_p$$ ... ... "I must say I was surprised and a little perplexed at a basis consisting of unevaluated partial derivatives ... but on reflection ... $$D_p ( \mathbb{R}^n )$$ is a space of derivations, that is linear maps satisfying the Leibniz rule ... so having a basis consisting of linear maps $$\frac{ \partial }{ \partial x^i } \mid_p$$ is not too surprising ... but how to think of a tangent vector as
$$v = \sum v^i \frac{ \partial }{ \partial x^i } \mid_p$$ ... ...is a bit of a mystery ... certainly it is hard to imagine the above quantity as an arrow at point $$p$$ ... also why we are dong this is a bit of a mystery too ...
Can someone please clarify ... ...
Hope someone can help to clarify the above issues ... ...
Peter
==========================================================================================It may help MHB readers of the above post to have access to the start of Tu's section on derivations ... so I am providing access to the same ... as follows:
View attachment 8644
Hope the above text helps with context and meaning ...
Peter
I need help in order to fully understand Theorem 2.2 and the remarks after the theorem ...Theorem 2.2 and the remarks after the theorem read as follows:View attachment 8642
View attachment 8643My questions on the above text from Tu are as follows:
Question 1
At the end of the proof of the above theorem by Tu we read the following:
" ... ... This proves that $$D = D_v$$ for $$v = \langle D x^1 / ... / ... / D x^n \rangle$$ ... ..."The above implies $$v^i = D x^i$$ ... ... but what does $$D x^i$$ mean and how exactly is it equal to $$v^i$$ ... ... ?
Question 2 In some remarks after the end of the proof of the above theorem by Tu we read the following:
" ... ... Under the vector space isomorphism $$T_p ( \mathbb{R}^n ) \simeq D_p ( \mathbb{R}^n )$$, the standard basis $$e_1 \ ... \ ... \ e_n$$ for $$T_p ( \mathbb{R}^n )$$ corresponds to the set $$\partial / \partial x^1 \mid_p \ ... \ ... \ \partial / \partial x^1 \mid_p$$ of partial derivatives. From now on, we will make this identification and write a tangent vector $$v = \langle v^1 \ ... \ ... \ v^n \rangle = \sum v^i e_i$$ as
$$v = \sum v^i \frac{ \partial }{ \partial x^i } \mid_p$$ ... ... "I must say I was surprised and a little perplexed at a basis consisting of unevaluated partial derivatives ... but on reflection ... $$D_p ( \mathbb{R}^n )$$ is a space of derivations, that is linear maps satisfying the Leibniz rule ... so having a basis consisting of linear maps $$\frac{ \partial }{ \partial x^i } \mid_p$$ is not too surprising ... but how to think of a tangent vector as
$$v = \sum v^i \frac{ \partial }{ \partial x^i } \mid_p$$ ... ...is a bit of a mystery ... certainly it is hard to imagine the above quantity as an arrow at point $$p$$ ... also why we are dong this is a bit of a mystery too ...
Can someone please clarify ... ...
Hope someone can help to clarify the above issues ... ...
Peter
==========================================================================================It may help MHB readers of the above post to have access to the start of Tu's section on derivations ... so I am providing access to the same ... as follows:
View attachment 8644
Hope the above text helps with context and meaning ...
Peter