Like Tony Stark
- 182
- 6
- Homework Statement
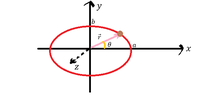
- A bead of mass ##m## is placed on a vertically oriented elliptical hoop. The mass is attached to a spring of constant ##k## with its end in one of the foci. Find the equations of motion using D'Alembert's principle.
- Relevant Equations
- D'Alembert's principle
##F_E=-kd##, ##d##: distance between mass and end of the spring
Hi
I've written D'Alembert's principle as you can see in the attached files. I computed the virtual work done by the weight and the elastic force (since the work done by the normal force is zero) and then I used the fundamental hypothesis, which states that the constraint forces can be written as the gradient of the holonomic constraints and the virtual work is zero.
The equation gets ugly, so I want to know if it's okay.
I've written D'Alembert's principle as you can see in the attached files. I computed the virtual work done by the weight and the elastic force (since the work done by the normal force is zero) and then I used the fundamental hypothesis, which states that the constraint forces can be written as the gradient of the holonomic constraints and the virtual work is zero.
The equation gets ugly, so I want to know if it's okay.