kekpillangok
- 15
- 2
- Homework Statement
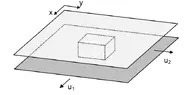
- A small brick is compressed between two parallel planes in zero gravity. The planes are perpendicular to the z-axis. The bottom plane is moving with a constant velocity ##u _{1 } ## along the x-axis, while the top plane is moving with a constant velocity ##u _{2 } ## along the y-axis. Initially, the brick is at rest. The coefficients of kinetic friction between the brick and each plane are identical.
Find the velocity ##\vec{v } ## of the brick after a long time for ##u _{1 }>u _{2 } ##.
- Relevant Equations
- f = ma
f_friction = mi * N
Here's what I've tried.
##\vec{v } ## is the velocity of the brick after it has stopped changing. I've been able to conclude that this must happen when the relative velocity vectors ## \vec{v }-\vec{u }_{1 }## and ## \vec{v }-\vec{u }_{2 }## lie along the line connecting the tip of ##\vec{u }_{1 } ## to the tip of ##\vec{u }_{2 } ##. One can see this by drawing diagrams like these:

I've already figured out, by examining the forces acting on the brick, that the friction forces have the same magnitude. It follows, then, that, for the friction forces to cancel each other out, they must be aligned as follows:

This forces ##\vec{v } ## to point from the origin to the segment connecting the tips of ##\vec{u }_{1 } ## and ##\vec{u }_{2 } ##. I cannot, however, for the life of me, figure out where exactly on that segment ##\vec{v } ## will point after a long time has elapsed. I've tried reasoning as follows: at the very first moment after the brick is released, two friction forces of equal magnitude act on it, one pointing in the direction of ## \vec{u }_{1 }## and the other pointing in the direction of ## \vec{u }_{2 }##—i.e. the net force makes an angle of 45° with the horizontal, and I thought, at first, that there was no reason why the net force would steer off that angle. However, I found that it does, and now I'm having a hard time figuring things out.
If I can find where the endpoint of ##\vec{v } ## lies on the hypotenuse ##{\left| \vec{v }-\vec{u }_{1 }\right| }+{\left| \vec{v }-\vec{u }_{2 }\right| } ##, the problem becomes one of finding a cevian where the segments into which it divides are more or less determined. At present, I can't see a nice property about this net force, always pointing along the bisector of the relative velocity vectors, that will help me find this endpoint. If anyone can suggest an idea or lend a hand, I will be extremely grateful.
##\vec{v } ## is the velocity of the brick after it has stopped changing. I've been able to conclude that this must happen when the relative velocity vectors ## \vec{v }-\vec{u }_{1 }## and ## \vec{v }-\vec{u }_{2 }## lie along the line connecting the tip of ##\vec{u }_{1 } ## to the tip of ##\vec{u }_{2 } ##. One can see this by drawing diagrams like these:
I've already figured out, by examining the forces acting on the brick, that the friction forces have the same magnitude. It follows, then, that, for the friction forces to cancel each other out, they must be aligned as follows:
This forces ##\vec{v } ## to point from the origin to the segment connecting the tips of ##\vec{u }_{1 } ## and ##\vec{u }_{2 } ##. I cannot, however, for the life of me, figure out where exactly on that segment ##\vec{v } ## will point after a long time has elapsed. I've tried reasoning as follows: at the very first moment after the brick is released, two friction forces of equal magnitude act on it, one pointing in the direction of ## \vec{u }_{1 }## and the other pointing in the direction of ## \vec{u }_{2 }##—i.e. the net force makes an angle of 45° with the horizontal, and I thought, at first, that there was no reason why the net force would steer off that angle. However, I found that it does, and now I'm having a hard time figuring things out.
If I can find where the endpoint of ##\vec{v } ## lies on the hypotenuse ##{\left| \vec{v }-\vec{u }_{1 }\right| }+{\left| \vec{v }-\vec{u }_{2 }\right| } ##, the problem becomes one of finding a cevian where the segments into which it divides are more or less determined. At present, I can't see a nice property about this net force, always pointing along the bisector of the relative velocity vectors, that will help me find this endpoint. If anyone can suggest an idea or lend a hand, I will be extremely grateful.
Attachments
Last edited:
 ), but would either
), but would either 