Coordinate transformations — 45 discussions
-

Undergrad Transformation of second rank tensor
In all the sources I checked, except for one by Dwight E. Neuenschwander, Tensor Calculus for Physics: A Concise Guide, they only provide the definition of a tensor (or describe how it transforms). However, Neuenschwander attempts to motivate the definition of a second-rank tensor. First, he...- LightPhoton
- Thread
- Coordinate transformations Tensor analysis Tensors
- Replies: 4
- Forum: Differential Geometry
-

Undergrad Transforming coordinates between Cartesian and spherical
I apologize if this has been asked before. I searched on this site and others but didn't find this particular issue. My background is physics and math. My question is near the end of the post. First, let me explain my thoughts leading up to my question. After many years, I'm reviewing the...- trekie
- Thread
- Coordinate Coordinate transformations Physics
- Replies: 1
- Forum: General Math
-

Undergrad Spacetime coordinate smoothness requirement
Hi, I was keep reading the interesting book Exploring Black Holes - second edition from Taylor, Wheeler, Bertschinger. I'd like to better understand some points they made. In Box 3 section 3-6 an example of coordinate singularity at point O in Euclidean plane in polar coordinates centered there...- cianfa72
- Thread
- Coordinate systems Coordinate transformations Manifolds Schwarzschild geometry Spacetime curvature
- Replies: 8
- Forum: Special and General Relativity
-

Undergrad Minkowski to Euclidean line element from coordinate changes?
I would guess there’s some subtlety in the relationship between basis vectors and coordinates that I’m ignoring, but I really have no idea. $$ ds^2 = -dt^2 + d\tilde{x}^2 $$ $$ d\tilde{t} = dt / \sqrt{\tilde{x}} $$ $$ \downarrow $$ $$ ds^2 = -\tilde{x} ~ d\tilde{t}^2 + d\tilde{x}^2 $$ $$ dx...- Pencilvester
- Thread
- Coordinate transformations Line element
- Replies: 5
- Forum: Special and General Relativity
-
K
Undergrad Is There a Connection Between Conjugation and Change of Basis?
For transformations, A and B are similar if A = S-1BS where S is the change of basis matrix. For Lie groups, the adjoint representation Adg(b) = gbg-1, describes a group action on itself. The expressions have similar form except for the order of the inverses. Is there there any connection...- knowwhatyoudontknow
- Thread
- Adjoint representation Change of basis Coordinate transformations Lie groups Linear transformations
- Replies: 1
- Forum: Linear and Abstract Algebra
-
H
Coordinate transformation of the Navier Stokes equation
i have successfully transformed the continuity equation using coordinate transform,but having trouble with the momentum equation . can someone kindly provide the transformation of the right hand sight of equation of the image i have attached.- hcpysicist
- Thread
- Coordinate transformations Fluid dynamics Navier stokes equation
- Replies: 0
- Forum: Advanced Physics Homework Help
-
Coordinate Transformation (multivariable calculus)
My Progress: I tried to perform the coordinate transformation by considering a general function ##f(\mathbf{k},\omega,\mathbf{R},T)## and see how its derivatives with respect all variable ##(\mathbf{k},\omega,\mathbf{R},T)## change: $$ \frac{\partial}{\partial\omega} f =...- luqman
- Thread
- Calculus Classical mechanics Coordinate Coordinate transformation Coordinate transformations Electromagnetic field Multivariable calculus Quanfum field theory Transformation
- Replies: 1
- Forum: Advanced Physics Homework Help
-

Undergrad Coord Transform in de Sitter Space: Phys Significance &Linearity?
Could one derive a set of coordinate transformations that transforms events between different reference frames in the de Sitter metric using the invariant line element, similar to how the Lorentz Transformations leave the line element of the Minkowski metric invariant? Would these coordinate...- Sciencemaster
- Thread
- Coordinate Coordinate transformation Coordinate transformations General relativity Line element Lorentz transformations Space Transformation
- Replies: 5
- Forum: Special and General Relativity
-
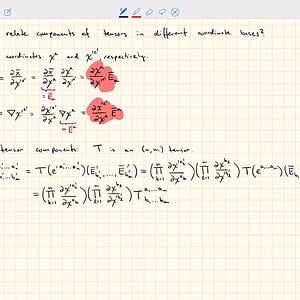
SH2372 General Relativity (7): Tensor components and coordinate transformations
- Orodruin
- Media item
- Coordinate transformations Tensor analysis
- Comments: 0
- Media category: Relativity
-

Undergrad Lewis H Ryder: Cartesian to Polar Coord Transformations
The example is about the transformation between the cartesian coordinates and polar coordinates using the definition In lewis Ryder's solution, I got confused in this specific line I really can't see how is that straightforward to find?- Ayoub Tamin
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 2
- Forum: Special and General Relativity
-
A
Coordinate transformations on the Minkowski metric
The line element given corresponds to the metric: $$g = \begin{bmatrix}a^2t^2-c^2 & at & 0 & 0\\at & 1 & 0 & 0\\0 & 0 & 1 & 0\\0 & 0 & 0 & 1\end{bmatrix}$$ Using the adjugate method: ##g^{-1}=\frac{1}{|g|}\tilde{g}## where ##\tilde{g}## is the adjugate of ##g##. This gives me...- amathie
- Thread
- Coordinate Coordinate transformations Metric Minkowski Transformations
- Replies: 3
- Forum: Advanced Physics Homework Help
-
L
Differentiating with coordinate transformations
T = (x+\frac{1}{\alpha}) sinh(\alpha t) X = (x+\frac{1}{\alpha}) cosh(\alpha t) - \frac{1}{\alpha} Objective is to show that ds^2 = -(1 +\alpha x)^2 dt^2 + dx^2 via finding dT and dX and inserting them into ds^2 = -dT^2 + dX^2 Incorrect attempt #1: dT= (dx+\frac{1}{\alpha})...- liu111111117
- Thread
- Coordinate Coordinate transformations Differentiating General relativity Lorentz boost Spacetime interval Transformations
- Replies: 5
- Forum: Advanced Physics Homework Help
-
W
Graduate Coord Transf. in Linearized GR: Understanding Metric Transformation
I was studying linearized GR where we make the following coordinate transformation ## \tilde{x}^{a} = x^{a} + \epsilon y^{a}(x) ## This coordinate transformation is then meant to imply ## g_{ab}(x) = \tilde{g}_{ab}(x) + \epsilon \mathcal{L}_{Y} g_{ab} ## Would anyone be kind enough to explain...- Woolyabyss
- Thread
- Coordinate Coordinate transformations General relaivity Gr Transformations
- Replies: 5
- Forum: Special and General Relativity
-
E
Undergrad Coordinate transformations in GR
Hi there I'm studying GR and I am confused about coordinate transformations. In my understanding, if I want to study a rotating reference system this is what I do. In my inertial system the object trajectory is described by $$ x = r\cos(\theta - \omega t)\\ y = r\sin(\theta - \omega t) $$...- eoghan
- Thread
- Coordinate Coordinate transformations Gr Transformations
- Replies: 29
- Forum: Special and General Relativity
-
L
MATLAB Plotting Coordinate Transformations in Matlab
I was reading this article (https://www.nature.com/articles/srep40083) about designing a panoramic lens with transformation optics, and wanted to try to play around with modifying the coordinate transformations. I contacted one of the authors of the article, and she mentioned that she plotted...- Lizard
- Thread
- Coordinate Coordinate transformations Matlab Plotting Transformations
- Replies: 1
- Forum: MATLAB, Maple, Mathematica, LaTeX
-

General relativity- Coordinate/metric transformations
Homework Statement Consider the metric ds2=(u2-v2)(du2 -dv2). I have to find a coordinate system (t,x), such that ds2=dt2-dx2. The same for the metric: ds2=dv2-v2du2. Homework Equations General coordinate transformation, ds2=gabdxadxb The Attempt at a Solution I started with a general...- jgarrel
- Thread
- Coordinate systems Coordinate transformations Differential geometry General General relativity Relativity Transformations
- Replies: 3
- Forum: Advanced Physics Homework Help
-
Q
Undergrad Coordinate transformation - Rotation
How author derives these old basis unit vectors in terms of new basis vectors ? Please don't explain in two words. \hat{e}_x = cos(\varphi)\hat{e}'_x - sin(\varphi)\hat{e}'_y \hat{e}_y = sin(\varphi)\hat{e}'_x + cos(\varphi)\hat{e}'_y- Quanta
- Thread
- Coordinate Coordinate transformation Coordinate transformations Rotation Transformation
- Replies: 10
- Forum: Differential Geometry
-
S
Cartesian to curvilinear coordinate transformations
Homework Statement Is there a more intuitive way of thinking or calculating the transformation between coordinates of a field or any given vector? The E&M book I'm using right now likes to use the vector field ## \vec F\ = \frac {\vec x} {r^3} ## where r is the magnitude of ## \vec x...- Stendhal
- Thread
- Cartesian Coordinate Coordinate transformations Curvilinear Transformations
- Replies: 1
- Forum: Introductory Physics Homework Help
-
L
Undergrad Determining Coordinate Transformations for Cloaking Device
I was reading this article: https://arxiv.org/ftp/arxiv/papers/1005/1005.5206.pdf , regarding the mathematical description of a diamond-shaped cloaking device, and am struggling to understand how the authors found the coordinate transformations in equations (1) and (5). What is the process for...- Lizard
- Thread
- Coordinate Coordinate transformations Device Transformations
- Replies: 1
- Forum: Differential Geometry
-
&
Graduate How Does the Jacobian Affect Coordinate Transformations?
Apologies for perhaps a very trivial question, but I'm slightly doubting my understanding of Jacobians after explaining the concept of coordinate transformations to a colleague. Basically, as I understand it, the Jacobian (intuitively) describes how surface (or volume) elements change under a...- "Don't panic!"
- Thread
- Change of basis Coordinate systems Coordinate transformations Jacobian
- Replies: 30
- Forum: Linear and Abstract Algebra
-
9
Graduate Coordinate transformation - NED and ECEF frames
Hi, I have a reference device that outputs euler angles, which are angles that relate the sensor body frame to the north east down frame. These angles are called pitch roll and yaw. The sensor is an accelerometer. I know how to get the rotation matrix that will put accelerations from the...- 9988776655
- Thread
- Coordinate Coordinate transformation Coordinate transformations Euler Frame Frame of reference Frames Transformation Transformations
- Replies: 2
- Forum: Differential Geometry
-

Graduate Question about Coordinate Change
Suppose that I have a two-dimensional coordinate system (x,y) and I change to a new coordinate system (u,v). What I know is that there is some function \theta(u,v) such that: \dfrac{\partial x}{\partial u} = cos(\theta) \dfrac{\partial x}{\partial v} = -sin(\theta) \dfrac{\partial y}{\partial...- stevendaryl
- Thread
- Change Coordinate Coordinate transformations Rotations
- Replies: 3
- Forum: Differential Equations
-
L
Graduate Adjacency Matrix to Coordinate Transformations
I've come up with a curious two-part question while working on a map program: What is the minimum number of points necessary in order to transform an NxN adjacency matrix into a coordinate matrix in terms of N given Euclidean space? As this question relates to map-making, where I don't...- lightfire
- Thread
- Coordinate Coordinate transformations Matrix Transformations
- Replies: 4
- Forum: Differential Geometry
-
G
Undergrad How can I rotate a coordinate system and write functions in the rotated system?
Hey So, I was wondering how to convert from one coordinate axes to another... in particular, where the new axes are y = x and y = -x, as seen by the picture below I want it so that the Red dot in the new coordinate system will be (\sqrt2,0). Is there an easy way to do this? (My lookings on...- Gackhammer
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 2
- Forum: General Math
-

Graduate Coordinate transformations in GR, worked examples?
I have read over and over in various places about coordinate transformations, and understand the theory (really!), but can't find any worked examples of actual use of the transformation equations. Does anyone know of any web references or tutorials on the subject? To make things a little more...- m4r35n357
- Thread
- Coordinate Coordinate transformations Gr Transformations
- Replies: 3
- Forum: Special and General Relativity
-
F
Help with coordinate transformations
Homework Statement I'm having trouble understanding coordinate transformations for vector fields. There are two 'coordinate pieces', the coordinates pieces of the vector at a point changes, and the function describing the field can also be rewritten in terms of the new coordinates. I'm...- frogster
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 3
- Forum: Precalculus Mathematics Homework Help
-
S
Graduate Notation Convention: Primes in Coordinate Transformations
I have seen in various locations different conventions regarding the location of a prime symbol denoting a tensor represented in a new frame. For example, if the position four-vector is x^{\mu} then this four-vector in a different frame is often written as either x'^{\mu} or...- Steely Dan
- Thread
- Convention Coordinate Coordinate transformations Notation Primes Transformations
- Replies: 1
- Forum: Special and General Relativity
-
M
Undergrad Allowable Coordinate Transformations?
I've studied classical physics and never heard this before until recently...the allowable coordinate transformations for classical mechanics are rotations and translations. Could someone explain why this is so? What makes these "allowable" (I know they are orthogonal transformations).- mmmboh
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 10
- Forum: Beyond the Standard Models
-
C
Graduate Coordinate transformations in gr
Hi, My question is the following. In special relativity, the Lorentz transformations correspond to a physical situation in which two frames of reference move with uniform rectilinear motion one with respect to the other. In general relativity, given the physical situation in which one frame...- cndcnd
- Thread
- Coordinate Coordinate transformations Gr Transformations
- Replies: 7
- Forum: Special and General Relativity
-
C
Graduate Del operator with coordinate transformations
How can you express the del operator after a change of variables? For example, if I want to use cylindrical coordinates for a fluids problem, what is the del operator in terms of the new coordinates? And how do you derive it for any other arbitrary coordinate transforms?- Curl
- Thread
- Coordinate Coordinate transformations Del Operator Transformations
- Replies: 7
- Forum: Differential Geometry
-
D
General coordinate transformations for tensors
Homework Statement Write down the transformation laws under general coordinate transformations for a tensor of type (0,1) and a tensor of type (2,1) respectively The Attempt at a Solution I seem to have two transformation formulas but they could in fact just be the same thing. I'll just do...- Deadstar
- Thread
- Coordinate Coordinate transformations General Tensors Transformations
- Replies: 1
- Forum: Advanced Physics Homework Help
-
J
Graduate Coordinate singularities and coordinate transformations
I have a metric of the form ds^2 = (1-r^2)dt^2 -\frac{1}{1-r^2}dr^2-r^2 d\theta^2 - r^2 sin^2\theta d\phi^2 A singularity exists at r=\pm 1 . By calculating R^{abcd}R_{abcd} i found out that this singularity is a coordinate singularity. I found the geodesic equations for radial photons...- jinbaw
- Thread
- Coordinate Coordinate transformations Singularities Transformations
- Replies: 7
- Forum: Special and General Relativity
-
F
Graduate About coordinate transformations in general
I want to make sure of my understanding of coordinate transformations. First of all, is it true that if \[{x_i}\] is a coordinate system on a manifold, then \[{q_j} = {q_j}({x_i})\] is a coordinate transform from "x" space to "q" space? If so can "x" be a flat space and "q" a curved...- friend
- Thread
- Coordinate Coordinate transformations General Transformations
- Replies: 43
- Forum: Differential Geometry
-
D
Graduate Coordinate transformations question
Hi all, I've been struggling with this for a couple of days now and am positing a question in the hope that someone can help me out. I have a global cartesian coordinate system X, Y, Z and a cube with it's centre at (0,0,0) and dimension 1. Hence it's corners are: (0.5, -0.5, 0.5), (-0.5...- danhumphreys
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 5
- Forum: Differential Geometry
-
M
Graduate Coordinate Transformations Question
Hi there. This isn't so much a math question as it is a conceptual question. I can't seem to wrap my head around the need for coordinate transformations. *Why* do they need to be done? I think I really need a picture for this, so this might not be the right place to ask, but if you can...- mjb
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 2
- Forum: Linear and Abstract Algebra
-
M
How Is Collision Speed Calculated in a Supermarket Parking Lot Incident?
Homework Statement On a supermarket parking lot, a car is pulling out and bumping into an oncoming car. The car pulls out with 0.8 m/s, while the oncoming car has a speed of 1.2 m/s. The angle between the velocities is 24 degrees, as indicated in the figure. What is the collision speed...- melmel7880
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 1
- Forum: Introductory Physics Homework Help
-
R
Undergrad Vectors and coordinate transformations
Can anyone explain why it's important to be able to take vectors in an x,y,z coordinate system and be able to transform them into other coordinate systems. Could not all vector considerations be grappled with in the standard x,y,z coordinate systems? How important is this ability to physicists...- rockyshephear
- Thread
- Coordinate Coordinate transformations Transformations Vectors
- Replies: 15
- Forum: Classical Physics
-
G
Graduate Coordinate transformations Spherical to Cartesian
Hi, I would like to transform a vector from Spherical to cartesian coordinate system. But the question is probably not that straight forward. :( I have a vector say E = E_r~\hat{r}+E_{\theta}~\hat{\theta}+E_{\phi}~\hat{\phi}. But I know only the cartesian coordinate from where it...- gaganaut
- Thread
- Cartesian Coordinate Coordinate transformations Spherical Transformations
- Replies: 5
- Forum: Differential Geometry
-
M
Graduate Coordinate Transformations in GR
As I try to understand GR, I find coordinate transformations just about everywhere. My question is simply: What is the reason coordinate transformations play such an important role in GR? Thanks.- Mad Dog
- Thread
- Coordinate Coordinate transformations Gr Transformations
- Replies: 5
- Forum: Special and General Relativity
-
K
Graduate Lorentz invariance and General Coordinate transformations
Sorry to bring up again a question that I asked before but I am still confused about this. In SR we have Lorentz invariance. Now we go to GR and one says that the theory is invariant under general coordinate transformations (GCTs). But, as far as I understand, this is simply stating that...- kdv
- Thread
- Coordinate Coordinate transformations General Invariance Lorentz Lorentz invariance Transformations
- Replies: 3
- Forum: Special and General Relativity
-
J
Graduate Combining coordinate transformations
I have a vector (<1, 0, 0>) that needs to be transformed from an initial 3d rectangular coordinate system M1 through M2 and M3 to a final 3d rectangular system M4. I'm currently doing this by applying sequential rotations omega, phi, and kappa about the x', y', and z' axes, respectively, for...- joeljkp
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 1
- Forum: Linear and Abstract Algebra
-
T
Graduate Coordinate transformations and acceleration
So often students question the validity of the twin paradox and how acceleration is involved in looking at round trip scenarios that I am asking why not just give them the tools to transform between the coordinates of an inertial frame and those of an accelerating frame. It is not hard to do and...- Trilairian
- Thread
- Acceleration Coordinate Coordinate transformations Transformations
- Replies: 4
- Forum: Special and General Relativity
-
D
Graduate How Can I Visualize 3D Rotation Transformations in Linear Algebra?
These problems are actually for my classical mechanics class, but they are linear-algebra based. I can construct a transformation matrix, but I have trouble visualizing the rotations, particularly in 3-space. So if someone could help me get a pictorial idea of what's actually happening, then...- don_anon25
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 1
- Forum: Linear and Abstract Algebra
-
N
Graduate General Coordinate Transformations
Gents, Could you please help me: Speaking about General Coordinate Transformations, one speaks always generally. Are there any explicit expressions for General Coordinate Transformations? Like in SR speaking about Lorentz Transfrmations one recalls Lorentz Matrixes. Maybe I'm not quite...- Neitrino
- Thread
- Coordinate Coordinate transformations General Transformations
- Replies: 2
- Forum: Special and General Relativity
-
O
Graduate How Do Cartesian Components Transform into Cylindrical Coordinates?
Hi. I’ve just started learning about tensors on my own and am still trying to understand coordinate transformations. If I begin with a vector whose Cartesian components are (x, y, z) and apply the tensor transformation to cylindrical polars, I end up with (r, 0, z) – is this right? I...- od7
- Thread
- Coordinate Coordinate transformations Transformations
- Replies: 5
- Forum: Differential Geometry