Gifty01
- 11
- 0
- TL;DR
- COG calculation of diffracted spots on a camera
Hi all,
I will like to simulate diffracted spots at least two spots, on a camera. I will be glad if someone can help out with a code. below are the details required:
camera pixel size = 4um (each pixel can be sub divided for better calculation), gap size = 100nm, camera length = 4000 x 4000 pixels, diffracted spot size on the camera = 30 um (airy disk eqn or gaussion eqn can be used to simulate the diffracted spot), photon noise = poisson distribution, read out noise = zero mean normal noise, monte-carlo simulation = 500 random realizations. Other details if needed are:
saturation capacity = 10300, QE = 68%, SNR =6.7 bit.
 Eqn for COG calculation
Eqn for COG calculation
At each iterations, the true center is placed randomly within the CCD pixel and then compared to the measured center.
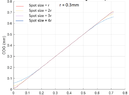
A graph of Center of gravity (COG) against spot positioning (i.e moved across the sensor from left to right) should be calculated. A sample of how the plot will look like is attached.

Due to effect of sensor edge, the COG calculation deflects from the real value. I will like to create a matrix which corrects the COG calculation by subtracting e.g at the left edge of the edge, and adding up e,g at the other edge to the right. since the measured COG value is known. Thanks in advance.
I will like to simulate diffracted spots at least two spots, on a camera. I will be glad if someone can help out with a code. below are the details required:
camera pixel size = 4um (each pixel can be sub divided for better calculation), gap size = 100nm, camera length = 4000 x 4000 pixels, diffracted spot size on the camera = 30 um (airy disk eqn or gaussion eqn can be used to simulate the diffracted spot), photon noise = poisson distribution, read out noise = zero mean normal noise, monte-carlo simulation = 500 random realizations. Other details if needed are:
saturation capacity = 10300, QE = 68%, SNR =6.7 bit.
At each iterations, the true center is placed randomly within the CCD pixel and then compared to the measured center.
A graph of Center of gravity (COG) against spot positioning (i.e moved across the sensor from left to right) should be calculated. A sample of how the plot will look like is attached.
Due to effect of sensor edge, the COG calculation deflects from the real value. I will like to create a matrix which corrects the COG calculation by subtracting e.g at the left edge of the edge, and adding up e,g at the other edge to the right. since the measured COG value is known. Thanks in advance.