lorenz0
- 151
- 28
- Homework Statement
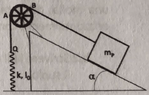
- Consider a pulley which is a ring of radius ##r##.
1) Find the moment of inertia of the pulley with respect to an axis through its center and perpendicular to its plane, knowing that the work needed to make the pulley rotate with angular momentum ##L## around this axis is ##W##.
Now this pulley is placed on a frictionless inclined plane of angle ##\alpha##, and an ideal rope connects a mass ##m_p## to a spring placed vertically to the left of the inclined plane, and with one end attached to the ground.
2) Find the length of the spring at equilibrium.
Starting from the equilibrium position we give to mass ##m_p## a speed ##v_i## parallel to the inclined plane and downwards.
If the rope doesn't slide on the pulley and always remains taut, find:
3) Period of the oscillation of the system.
4) The maximum and minimum value of the tension applied to the spring and to mass ##m_p##.
5) The maximum value of the kinetic energy of the system.
- Relevant Equations
- ##\sum_{i}\vec{F}_i=m\vec{a},\ W=\Delta K=K_f-K_i,\ F_{spring}=-ks,\ T=\frac{2\pi}{\omega}.##
1) By the Work-Energy Theorem, ##W=K_f-K_i=\frac{1}{2}I_{0}\omega^2=\frac{L^2}{2I_0}.##
2) By assuming that the initial length of the spring is ##0##, calling its final length ##S## and ##T## the tension in the rope connecting the pulley and mass ##m_p## I have: ##\begin{cases}(kS-T)r=0\\ m_p g\sin(\alpha)-T=0 \end{cases}## which gives ##S=\frac{m_pg\sin (\alpha)}{k}.##
3) mass ##m_p## oscillates around the equilibrium position, so by denoting ##s## the displacement of ##m_p## from the equilibrium position I get ##-ks=m_p s''\Rightarrow s''=-\frac{k}{m_p}s\Rightarrow \omega=\sqrt{\frac{k}{m_p}}\Rightarrow T=\frac{2\pi}{\omega}=2\pi\sqrt{\frac{m_p}{k}}. ##
Is it justifiable to ignore ##T## and ##-ks## since they "cancel out" each other because of the motion starting from the equilibrium position found before?
Thanks.
2) By assuming that the initial length of the spring is ##0##, calling its final length ##S## and ##T## the tension in the rope connecting the pulley and mass ##m_p## I have: ##\begin{cases}(kS-T)r=0\\ m_p g\sin(\alpha)-T=0 \end{cases}## which gives ##S=\frac{m_pg\sin (\alpha)}{k}.##
3) mass ##m_p## oscillates around the equilibrium position, so by denoting ##s## the displacement of ##m_p## from the equilibrium position I get ##-ks=m_p s''\Rightarrow s''=-\frac{k}{m_p}s\Rightarrow \omega=\sqrt{\frac{k}{m_p}}\Rightarrow T=\frac{2\pi}{\omega}=2\pi\sqrt{\frac{m_p}{k}}. ##
Is it justifiable to ignore ##T## and ##-ks## since they "cancel out" each other because of the motion starting from the equilibrium position found before?
Thanks.