Discussion Overview
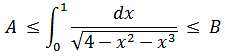
The discussion revolves around finding an interval for the value of a specific Riemann integral involving the function $\tfrac1{\sqrt{4-x^2-x^3}}$. Participants explore methods to estimate the integral's bounds and discuss the behavior of the function over the interval from 0 to 1.
Discussion Character
- Exploratory, Mathematical reasoning
Main Points Raised
- One participant suggests that the integral might be larger than 0 due to the function being positive on the interval from 0 to 1.
- Another participant notes that the function $\tfrac1{\sqrt{4-x^2-x^3}}$ increases on the interval $0\leqslant x\leqslant 1$, identifying the minimum and maximum values at the endpoints of the interval.
- Some participants confirm the approach of using the function's behavior to estimate the integral's bounds, but there is a question about the correctness of this method.
Areas of Agreement / Disagreement
Participants generally agree on the increasing nature of the function within the specified interval and the approach to estimate the integral's bounds, but there is uncertainty regarding the correctness of the proposed solutions.
Contextual Notes
The discussion does not resolve the mathematical steps necessary to definitively establish the bounds of the integral, and assumptions about the function's behavior may depend on further analysis.