Spector989
- 52
- 10
- Homework Statement
- A rectangular plate is placed on a rough plank. Dimensions of the plank is as shown in the figure. Find:-
minimum acceleration with which the plank should be moved so that the rectangular plate topples (conside the friction is sufficient so the plate does not side).
- Relevant Equations
- Torque = r×F , friction = u.N , F= ma
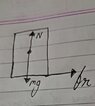
So i solved this question through non inertial frame but how do i solve this through inertial frame , when i used to solve only translation question when i observed through non inertial frame the main difference was in inertial frame Fnet = 0 and in non inertial frame Fnet -ma =0 (ma being pseudo force ). But now the absecnce of ma (psuedo force ) in FBD leads to improper calculation of torque. How do i solve this through inertial frame . My workings in non interial frame and FBD for inertial frame are given in the picture attachment