- #1
Amayer14
- 10
- 0
- TL;DR Summary
- Help with Torque and Motor size gearbox requirements
Hello,
New here but thanks in advance for help.
I need help sizing a motor/gearbox for a machine i am working on. known specs are below:
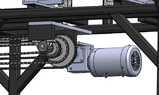
I have a solid shaft driving 4 gears that are all different sizes, the gear with the most weight attached has a pitch diameter of 7.65 in and they are sized evenly so the 4th gear has a ratio of 1:4 from the larger gear. Gears are pressed and have set screws onto the shaft and may potentially get a key way as well.
Its task is to move a weight of 66 pounds horizontally on a linear bearing rail. I don't know friction numbers for this bearing but they are low friction grease-less linear ball bearings. The other 3 gears are pulling/pushing 36 pounds each horizontally on a linear bearing rail. So one gear moves 66 lbs and the other three move 36 lbs each.
They basically move a set of support rails evenly at different distances but run off the same shaft.
shaft coupled to the motor is 1" in diameter and roughly 14" long.
I need to move this weight 160 inches in 4 seconds.
i would like a safety factor of 3 as well.
there are no concentration factors on the shaft as of right now.
for any other information, ask and i should have access to most measurements.
New here but thanks in advance for help.
I need help sizing a motor/gearbox for a machine i am working on. known specs are below:
I have a solid shaft driving 4 gears that are all different sizes, the gear with the most weight attached has a pitch diameter of 7.65 in and they are sized evenly so the 4th gear has a ratio of 1:4 from the larger gear. Gears are pressed and have set screws onto the shaft and may potentially get a key way as well.
Its task is to move a weight of 66 pounds horizontally on a linear bearing rail. I don't know friction numbers for this bearing but they are low friction grease-less linear ball bearings. The other 3 gears are pulling/pushing 36 pounds each horizontally on a linear bearing rail. So one gear moves 66 lbs and the other three move 36 lbs each.
They basically move a set of support rails evenly at different distances but run off the same shaft.
shaft coupled to the motor is 1" in diameter and roughly 14" long.
I need to move this weight 160 inches in 4 seconds.
i would like a safety factor of 3 as well.
there are no concentration factors on the shaft as of right now.
for any other information, ask and i should have access to most measurements.
Last edited: