MarkFL
Gold Member
MHB
- 13,284
- 12
Here is the question:
I have posted a link there to this topic so the OP can see my work.
Maths Prob5: Velocity & Acceleration?
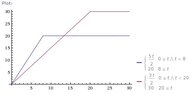
A motorbike and a car are waiting side by side at traffic lights, when the lights turn to green, the motorbike accelerates at a 2.5 m/s² up to a top speed of 20 m/s, and the car accelerates at 1.5 m/s² up to a top speed of 30 m/s . Both then continue to move at constant speed. Draw (t,v) graphs for each vehicle, using the same axes, and sketch the (t,s) graphs.
(a) after what time will the motorbike and the car again be side by side?
(b) what is the greatest distance that the motorbike is in front of the car?
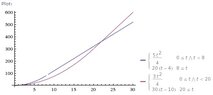
No need to show the Graphs, BUT I do want to know how to draw Displacement-time Graph when the object accelerates up to a point and then moves in a constant velocity, maybe accelerated part is curve line ?!
ANSWERS: (a) 22s (b) 53.3m
#Mechanics #A-Level
HELP!
I have posted a link there to this topic so the OP can see my work.