Thermofox
- 144
- 26
- Homework Statement
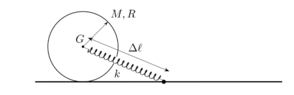
- A homogeneous disk, with mass ##M = 1 kg## and radius ##R = 0.2 m##, is placed on a rough plane on which it is able to move with pure rolling motion. The center ##G## of the disk is connected to an ideal spring, with negligible rest length and elastic constant ##k = 10 N/m##, fixed to the plane as shown in the figure. At the initial instant, the spring is stretched by ##Δl = 0.5 m## and the disk is at rest.
- Relevant Equations
- ##F_s= k \Delta l##
##\Sigma F = ma##
I need to determine:
1) The initial acceleration of the disk
2) the speed of the disk when the spring reaches minimum displacement
For point one I think I should use the free body diagram and then ##\Sigma F = ma##, I'm taking as positive the right and the upward directions and the counter clockwise direction:
##\begin{cases}
\Sigma F_x = ma \\
\Sigma F_y= 0 \\
\Sigma \tau = I \alpha
\end {cases}##
##\begin{cases}
F_{s,x} ?-? f = ma ; \text {I don't understand the supposed direction of the friction force, "f".}\\
N - F_{s,y} = 0 \\
\tau_f = I \alpha
\end {cases}##
Is ##f## opposed to ##F_{s,x}##, thus it is directed towards the left, because the disk is not moving. Or is it directed towards the right, since it opposes to the movement of the point of contact between the plane and the disk?
The second equation is not useful to the resolution of the problem then:
##\begin{cases}
F_{s,x} ?-? f = ma \\
?-?fR= I \alpha
\end {cases}##
Now I have another problem since I don't know how to define ##F_{s,x}##. I can only determine ##F_s##, but how can I determine the x-component?
Lastly for point 2, the spring reaches the minimum stretch when the spring is perpendicular to the plane and therefore when it has the same length of the radius, ##R##.
1) The initial acceleration of the disk
2) the speed of the disk when the spring reaches minimum displacement
For point one I think I should use the free body diagram and then ##\Sigma F = ma##, I'm taking as positive the right and the upward directions and the counter clockwise direction:
##\begin{cases}
\Sigma F_x = ma \\
\Sigma F_y= 0 \\
\Sigma \tau = I \alpha
\end {cases}##
##\begin{cases}
F_{s,x} ?-? f = ma ; \text {I don't understand the supposed direction of the friction force, "f".}\\
N - F_{s,y} = 0 \\
\tau_f = I \alpha
\end {cases}##
Is ##f## opposed to ##F_{s,x}##, thus it is directed towards the left, because the disk is not moving. Or is it directed towards the right, since it opposes to the movement of the point of contact between the plane and the disk?
The second equation is not useful to the resolution of the problem then:
##\begin{cases}
F_{s,x} ?-? f = ma \\
?-?fR= I \alpha
\end {cases}##
Now I have another problem since I don't know how to define ##F_{s,x}##. I can only determine ##F_s##, but how can I determine the x-component?
Lastly for point 2, the spring reaches the minimum stretch when the spring is perpendicular to the plane and therefore when it has the same length of the radius, ##R##.
 As you were...
As you were...