lorenz0
- 151
- 28
- Homework Statement
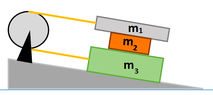
- Three boxes of mass ##m_1=10\ kg##, ##m_2=5\ kg## and ##m_3= 30\ kg## are arranged as shown in the figure and move by sliding down the inclined plane (##m_3##) and one on the other (##m_1## and ##m_2##).
The dynamic friction coefficient between the case of mass ##m_3## and the inclined plane is ##\mu_{d3} =0.15## while the dynamic friction coefficient between the ##m_2## and the other two boxes is ##\mu_d = 0.10##.
Find the acceleration of the boxes and the tension of the rope assuming that the rope is ideal and the pulley of negligible mass. Assume that the plane is inclined by an angle ##\alpha= \frac{\pi}{6}## and stationary with respect to the ground and that the boxes, do not fall over but remain one on top of the other during the observation period.
- Relevant Equations
- ##\sum_{i}\vec{F}_i=m\vec{a}##, ##F_{fr}=\mu_d N##
I have drawn three free body diagrams, one for each box and then I applied Newton's Second Law after choosing a reference frame rotated clockwise by ##\alpha##, with ##x## pointing south-east and ##y## pointing north-east and I got:
##\begin{cases}m_{1x}: -T+m_1g\sin(\alpha)+F_{fr_{12}}=m_1 (-a)\\ m_{2x}: -F_{fr_{12}}+F_{fr_{23}}+m_2g\sin(\alpha)=m_2 a_2\\ m_{3x}: -T-F_{fr_{23}}-F_{fr_3}+m_3g\sin(\alpha)=m_3 a\\ m_{1y}: N_1-m_1g\cos(\alpha)=0,\ |F_{fr_{12}}|=\mu_d N_1\\ m_{2y}: N_2-N_1-m_2g\cos(\alpha)=0,\ |F_{fr_{23}}|=\mu_d N_2\\ m_{3y}: N_3-N_2-m_3g\cos(\alpha)=0,\ |F_{fr_{3}}|=\mu_{d3}N_3\end{cases} ##
where ##F_{fr_{ij}}## denotes the friction force between objects ##i## and ##j##, ##a_1=a_2=a, T_1=T_3=T## since the rope is ideal and the pulley of negligible mass.
Now, I checked my solution against that of the text I am learning from and the text says that ##F_{fr_{23}}## on ##m_2## should point to the left and on ##m_3## to the right!
It says (all other equations coinciding with mine) that for ##m_2## and ##m_3## we have:
\begin{cases}
m_{2x}: -F_{fr_{12}}-F_{fr_{23}}+m_2g\sin(\alpha)=m_2 a_2\\ m_{3x}: -T+F_{fr_{23}}-F_{fr_{12}}+m_3g\sin(\alpha)=m_3 a
\end{cases}
How is that possible? As far as I can see as soon as the system is set in motion ##m_3## should go down the inclined plane and so the friction force with ##m_2## should prevent it from sliding, isn't it? If this is not the case then it makes me question the method I have always used up to now to find the direction of the friction: I try to see where the point of contact "is trying to move to" and I know that the friction force points in the opposite direction... is there another (better) way to do this? Thanks.
##\begin{cases}m_{1x}: -T+m_1g\sin(\alpha)+F_{fr_{12}}=m_1 (-a)\\ m_{2x}: -F_{fr_{12}}+F_{fr_{23}}+m_2g\sin(\alpha)=m_2 a_2\\ m_{3x}: -T-F_{fr_{23}}-F_{fr_3}+m_3g\sin(\alpha)=m_3 a\\ m_{1y}: N_1-m_1g\cos(\alpha)=0,\ |F_{fr_{12}}|=\mu_d N_1\\ m_{2y}: N_2-N_1-m_2g\cos(\alpha)=0,\ |F_{fr_{23}}|=\mu_d N_2\\ m_{3y}: N_3-N_2-m_3g\cos(\alpha)=0,\ |F_{fr_{3}}|=\mu_{d3}N_3\end{cases} ##
where ##F_{fr_{ij}}## denotes the friction force between objects ##i## and ##j##, ##a_1=a_2=a, T_1=T_3=T## since the rope is ideal and the pulley of negligible mass.
Now, I checked my solution against that of the text I am learning from and the text says that ##F_{fr_{23}}## on ##m_2## should point to the left and on ##m_3## to the right!
It says (all other equations coinciding with mine) that for ##m_2## and ##m_3## we have:
\begin{cases}
m_{2x}: -F_{fr_{12}}-F_{fr_{23}}+m_2g\sin(\alpha)=m_2 a_2\\ m_{3x}: -T+F_{fr_{23}}-F_{fr_{12}}+m_3g\sin(\alpha)=m_3 a
\end{cases}
How is that possible? As far as I can see as soon as the system is set in motion ##m_3## should go down the inclined plane and so the friction force with ##m_2## should prevent it from sliding, isn't it? If this is not the case then it makes me question the method I have always used up to now to find the direction of the friction: I try to see where the point of contact "is trying to move to" and I know that the friction force points in the opposite direction... is there another (better) way to do this? Thanks.
Attachments
Last edited: