Hak
- 709
- 56
- Homework Statement
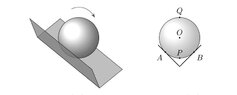
- Two rectangular pieces of metal are joined at right angles, forming a guide with two surfaces, which is then tilted at an angle ##\alpha## . A wooden ball descends down the rail, rolling without sliding. The figure shows the image from the side, and then from the front, viewed from below.
1.) Which point on the surface of the sphere has maximum instantaneous velocity?
2.) If ##v## is the speed at which the sphere falls, what speed does that point have?
3.) What is the minimum value of the coefficient of static friction between metal and wood?
Figure: https://imgur.com/tWy7d2n
edit: {See included figure at bottom}
- Relevant Equations
- /
About points 1. and 2., I assumed that the point of the sphere moving with maximum velocity is ##Q## and that the velocity at that point is ##v_Q= 2v##. In fact, at the highest point of a rotating sphere, the velocity is given by the sum of the velocities of translation and rotation. Since, in a pure rolling condition, the two velocities are equal, then the velocity at ##Q## will be:
$$v_Q = v + v = 2v$$
About point 3. I drew a sketch including the normal force, components of the weight, and the static friction force. There is barely enough
friction to keep the cylinder rolling without slipping. Since there is no slipping, the magnitude of the friction force is less than or equal to ##\mu_s N##. Writing down Newton’s laws in the x- and y-directions, we have ##\sum F_x= ma_x## ; ##\sum = F_y=ma_y##.
Substituting in from the free-body diagram:
$$mgsin \alpha −f_s =m(a_C)x$$
$$N - mg cos \alpha = 0$$,
we can then solve for the linear acceleration of the center of mass from these equations:
$$a_C =gsin \alpha - \frac{f_s}{m}$$However, it is useful to express the linear acceleration in terms of the moment of inertia. For this, we write down Newton’s second law for rotation,
$$\sum \tau_C=I_C \alpha$$
The torques are calculated about the axis through the center of mass of the cylinder. The only nonzero torque is provided by the friction force. We have
$$f_s r=I_C \alpha$$
Finally, the linear acceleration is related to the angular acceleration by
$$(a_C)x=r \alpha$$
These equations can be used to solve for ##a_C##, ##\alpha##, and ##f_s## in terms of the moment of inertia, where we have dropped the ##x##-subscript. We write ##a_C## in terms of the vertical component of gravity and the friction force, and make the following substitutions.
$$f_s = \frac{I_C \alpha}{r} =\frac {I_C a_C}{r^2}$$.
From this we obtain
$$a_C=gsin \alpha− \frac{I_C a_C}{mr^2} =\frac {mgsin \alpha}{m+\frac{I_C}{r^2}}.$$
Because slipping does not occur, ##f_s \le \mu_s N##. Solving for the friction force, $$f_s= \frac{mg I_C sin\alpha}{mr^2+I_C}.$$ Substituting this expression into the condition for no slipping, and noting that $$N = mg cos \alpha,$$ we have $$\frac{mg I_C sin\alpha}{mr^2+I_C} \le \mu_s mg cos\alpha,$$ or $$\mu_ s \ge \frac{tan \alpha}{1+\frac{mr^2}{I_C}}.$$ For a solid sphere: $$I_C = \frac{2}{5}m r^2.$$ So: $$\mu_s \ge \frac{2}{7} tan \alpha.$$ I think this result is not correct. Another friend of mine calculated it as $$ \mu_s \ge \frac{2 \sqrt{2} sin \alpha}{5 \sqrt{2} + 4},$$ but I don't know his method and probably it is not correct either. Could you please help me out?
$$v_Q = v + v = 2v$$
About point 3. I drew a sketch including the normal force, components of the weight, and the static friction force. There is barely enough
friction to keep the cylinder rolling without slipping. Since there is no slipping, the magnitude of the friction force is less than or equal to ##\mu_s N##. Writing down Newton’s laws in the x- and y-directions, we have ##\sum F_x= ma_x## ; ##\sum = F_y=ma_y##.
Substituting in from the free-body diagram:
$$mgsin \alpha −f_s =m(a_C)x$$
$$N - mg cos \alpha = 0$$,
we can then solve for the linear acceleration of the center of mass from these equations:
$$a_C =gsin \alpha - \frac{f_s}{m}$$However, it is useful to express the linear acceleration in terms of the moment of inertia. For this, we write down Newton’s second law for rotation,
$$\sum \tau_C=I_C \alpha$$
The torques are calculated about the axis through the center of mass of the cylinder. The only nonzero torque is provided by the friction force. We have
$$f_s r=I_C \alpha$$
Finally, the linear acceleration is related to the angular acceleration by
$$(a_C)x=r \alpha$$
These equations can be used to solve for ##a_C##, ##\alpha##, and ##f_s## in terms of the moment of inertia, where we have dropped the ##x##-subscript. We write ##a_C## in terms of the vertical component of gravity and the friction force, and make the following substitutions.
$$f_s = \frac{I_C \alpha}{r} =\frac {I_C a_C}{r^2}$$.
From this we obtain
$$a_C=gsin \alpha− \frac{I_C a_C}{mr^2} =\frac {mgsin \alpha}{m+\frac{I_C}{r^2}}.$$
Because slipping does not occur, ##f_s \le \mu_s N##. Solving for the friction force, $$f_s= \frac{mg I_C sin\alpha}{mr^2+I_C}.$$ Substituting this expression into the condition for no slipping, and noting that $$N = mg cos \alpha,$$ we have $$\frac{mg I_C sin\alpha}{mr^2+I_C} \le \mu_s mg cos\alpha,$$ or $$\mu_ s \ge \frac{tan \alpha}{1+\frac{mr^2}{I_C}}.$$ For a solid sphere: $$I_C = \frac{2}{5}m r^2.$$ So: $$\mu_s \ge \frac{2}{7} tan \alpha.$$ I think this result is not correct. Another friend of mine calculated it as $$ \mu_s \ge \frac{2 \sqrt{2} sin \alpha}{5 \sqrt{2} + 4},$$ but I don't know his method and probably it is not correct either. Could you please help me out?
Attachments
Last edited: