ilasus
- 49
- 8
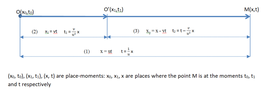
I consider three material points O, O', M, in uniform rectilinear motion in a common direction, so that in relation to the point O, the points O' and M move in the same direction with the constant velocities v and u (u>v>0). Assuming that at the initial moment (t0=0), the points O, O', M were in the same initial place (x0=0), the distances traveled by the points M and O' in relation to O, denoted by x and x1, respectively, are given by the laws of motion
x = ut, x1 = vt
where time t is measured from the initial moment. It follows that in relation to point O, point M travels the distance x during t expressed by the relations
(1) x = ut, t = (1/u)x
On the other hand, taking into account that the point M travels the distance
x1 = (v/u)x
during
t1 = x1/u = (v/u2)x
it follows that between points O and O', point M travels the distance x1 during t1 expressed by the relations
(2) x1 = vt, t1 = (v/u2)x
and from (1) and (2), it results that in relation to the point O’, the point M moves on the distance x2 during t2 given by the relations
(3) x2 = x - vt, t2 = t - (v/u2)x
The hypothesis that the points O' and M are moving in the same direction with respect to O, which led to relations (1), (2), (3), is in fact the point of view of an observer located at the origin O of a referential S. An observer located at the origin O' of a referential S' will have another point of view, namely that the points O and M are moving in opposite directions in relation to the point O'. Specifically, assuming that at the initial moment (t'0=0), the points O and M were in the same initial place (x'0=0), respectively at the origin O' of the referential S', then in relation to the point O', the point M travels the distance x' during t' given by the relations
(1') x' = ut', t' = (1/u)x'
between points O and O', point M travels the distance x'1 during t'1 given by the relations
(2') x'1 = vt', t'1 = (v/u2)x'
and in relation to the point O, the point M travels the distance x'2 during t'2 expressed by the relations
(3') x'2 = x' + vt', t'2 = t' + (v/u2)x '
However, even if x’0 = x0 and t’0 = t0, the homologous distances and time intervals traveled by the point M in the referentials S, S ’, expressed in the cases presented above, cannot be equal. Specifically, the distances and time intervals expressed in the relations (1'), (3) and (1), (3'), ie the distances x', x2 and x, x'2, respectively the time intervals t', t2 and t, t'2, can be at most proportional. In other words, the factor k in the equations
(4) x' = k(x - vt), t' = k(t - (v/u2)x)
(4') x = k(x' + vt'), t = k(t' + (v/u2)x')
it cannot be unitary. For example, if we try to solve the system of Cramer equations (4) in the unknowns x, t, or the system of Cramer equations (4') in the unknowns x', t', we find that they have the solutions (4') and respectively (4), only if we assign the value to the factor k
(5) k = 1/(1 - v2/u2)1/2
Note that if u = c, so M is a light signal, then the relations (4) and (4') are identified with the Lorentz transformations, and k given by (5) is the Lorentz factor.
What do you think about this?
x = ut, x1 = vt
where time t is measured from the initial moment. It follows that in relation to point O, point M travels the distance x during t expressed by the relations
(1) x = ut, t = (1/u)x
On the other hand, taking into account that the point M travels the distance
x1 = (v/u)x
during
t1 = x1/u = (v/u2)x
it follows that between points O and O', point M travels the distance x1 during t1 expressed by the relations
(2) x1 = vt, t1 = (v/u2)x
and from (1) and (2), it results that in relation to the point O’, the point M moves on the distance x2 during t2 given by the relations
(3) x2 = x - vt, t2 = t - (v/u2)x
The hypothesis that the points O' and M are moving in the same direction with respect to O, which led to relations (1), (2), (3), is in fact the point of view of an observer located at the origin O of a referential S. An observer located at the origin O' of a referential S' will have another point of view, namely that the points O and M are moving in opposite directions in relation to the point O'. Specifically, assuming that at the initial moment (t'0=0), the points O and M were in the same initial place (x'0=0), respectively at the origin O' of the referential S', then in relation to the point O', the point M travels the distance x' during t' given by the relations
(1') x' = ut', t' = (1/u)x'
between points O and O', point M travels the distance x'1 during t'1 given by the relations
(2') x'1 = vt', t'1 = (v/u2)x'
and in relation to the point O, the point M travels the distance x'2 during t'2 expressed by the relations
(3') x'2 = x' + vt', t'2 = t' + (v/u2)x '
However, even if x’0 = x0 and t’0 = t0, the homologous distances and time intervals traveled by the point M in the referentials S, S ’, expressed in the cases presented above, cannot be equal. Specifically, the distances and time intervals expressed in the relations (1'), (3) and (1), (3'), ie the distances x', x2 and x, x'2, respectively the time intervals t', t2 and t, t'2, can be at most proportional. In other words, the factor k in the equations
(4) x' = k(x - vt), t' = k(t - (v/u2)x)
(4') x = k(x' + vt'), t = k(t' + (v/u2)x')
it cannot be unitary. For example, if we try to solve the system of Cramer equations (4) in the unknowns x, t, or the system of Cramer equations (4') in the unknowns x', t', we find that they have the solutions (4') and respectively (4), only if we assign the value to the factor k
(5) k = 1/(1 - v2/u2)1/2
Note that if u = c, so M is a light signal, then the relations (4) and (4') are identified with the Lorentz transformations, and k given by (5) is the Lorentz factor.
What do you think about this?
Last edited by a moderator: