Discussion Overview
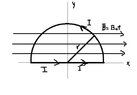
The discussion revolves around deriving a formula for the magnetic torque on a semicircular loop in a magnetic field. Participants explore the calculations of magnetic forces and torques, addressing both theoretical and mathematical aspects of the problem.
Discussion Character
- Technical explanation
- Mathematical reasoning
- Debate/contested
Main Points Raised
- One participant presents initial calculations for the magnetic force on both the non-curved and curved sections of the loop, expressing uncertainty about the correctness of their approach.
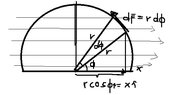
- Another participant clarifies that torque should be calculated with respect to an axis and provides a general formula for torque, emphasizing the need to consider the Lorentz force on different parts of the loop.
- It is noted that the total force on the loop is zero, which leads to a discussion about the necessity of using integration to account for varying forces along the loop.
- Questions are raised regarding the integration process, specifically about the derivation of certain terms and the limits of integration.
- Participants discuss the relationship between the Lorentz force, the geometry of the loop, and the calculation of torque, highlighting the complexity of the problem.
Areas of Agreement / Disagreement
Participants generally agree on the need for integration in calculating torque due to the varying forces along the loop. However, there remains uncertainty and confusion about specific steps in the derivation and the application of the formulas.
Contextual Notes
Some participants express confusion regarding the integration limits and the derivation of certain expressions, indicating that there are unresolved mathematical steps and assumptions that need clarification.
Who May Find This Useful
This discussion may be useful for students and practitioners interested in electromagnetism, particularly those looking to understand the derivation of torque in magnetic systems involving loops and the application of the Lorentz force.