Trying2Learn
- 375
- 57
- TL;DR
- What are the zero-eigenvalue modes of a 4 noded element
Hello
I wrote a Matlab code to form the 8 by 8 stiffness matrix of a single, 4-noded element, for a plane strain problem for an isotropic element.
I conduct an eigenvalue analysis on this matrix
Matlabe reports 5 non-zero eigenvalue modes, and 3 zero-eigenvalue modes (as expected)
Of the 3 zero-eigenvalue vectors, I KNOW that there should be two pure translations (one in each direction) and one rotation.
(I am doing this because I want to see the hourglass modes, out of interest, but i cannot even get that far to under-integrate, yet)
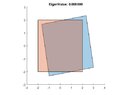
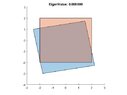
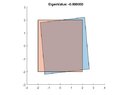
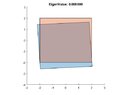
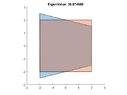
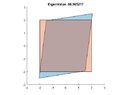
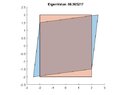
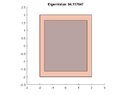
I am doing this in Matlab and I am getting my three zero-eigenvalue "vectors" and they look like this, below (first three images)
I can see that all three manifest free body translation and rotations (some have some deformation, but I can ignore that, for now).
The question is: what can (or should) I do to (in the Matlab code) so that these three zero eigenvalue modes, visualize as two pure translations and one rotation?
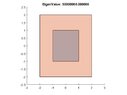
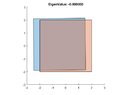
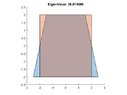
For the hell of it, I also plot TWO of the five non-zero eigenvalue modes (these are all what I expect)
(And to be honest, I would like to remove some of the deformation from the free body modes, too; and the fifth one seems to have pure shear but ALSO a rotation)
It seems as if Matlab is reporting combinations of the eigenvecors (and that makes no sense to me) -- unless I am very confused.
I wrote a Matlab code to form the 8 by 8 stiffness matrix of a single, 4-noded element, for a plane strain problem for an isotropic element.
I conduct an eigenvalue analysis on this matrix
Matlabe reports 5 non-zero eigenvalue modes, and 3 zero-eigenvalue modes (as expected)
Of the 3 zero-eigenvalue vectors, I KNOW that there should be two pure translations (one in each direction) and one rotation.
(I am doing this because I want to see the hourglass modes, out of interest, but i cannot even get that far to under-integrate, yet)
I am doing this in Matlab and I am getting my three zero-eigenvalue "vectors" and they look like this, below (first three images)
I can see that all three manifest free body translation and rotations (some have some deformation, but I can ignore that, for now).
The question is: what can (or should) I do to (in the Matlab code) so that these three zero eigenvalue modes, visualize as two pure translations and one rotation?
For the hell of it, I also plot TWO of the five non-zero eigenvalue modes (these are all what I expect)
(And to be honest, I would like to remove some of the deformation from the free body modes, too; and the fifth one seems to have pure shear but ALSO a rotation)
It seems as if Matlab is reporting combinations of the eigenvecors (and that makes no sense to me) -- unless I am very confused.