MarkFL
Gold Member
MHB
- 13,284
- 12
Here is the question:
Here is a link to the question:
A security camera is centered 50 ft above a 100 foot hallway... Related Rates Question! HELP? - Yahoo! Answers
I have posted a link there to this topic so the OP can find my response.
A security camera is centered 50 ft above a 100 foot hallway... Related Rates Question! HELP?
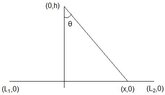
A security camera is centered 50 ft above a 100 foot hallway. It rotates back and forth to scan from one end of the hallway to the other. It is easiest to design the camera with a constant angular rate of rotation, but this results in a variable rate at which the images of the surveillance area are recorded. Therefore, it is desirable to design a system with a variable rate of rotation and a constant rate of movement of the scanning beam along the hallway. What rate of rotation is necessary to accomplish this? Verify you solution with some specific constant rates of movement.
Here is a link to the question:
A security camera is centered 50 ft above a 100 foot hallway... Related Rates Question! HELP? - Yahoo! Answers
I have posted a link there to this topic so the OP can find my response.