I_Try_Math
- 119
- 25
- Homework Statement
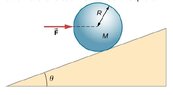
- A horizontal force ##\vec{F}## is applied to a uniform sphere in direction exact toward the center of the sphere, as shown below. Find the magnitude of this force so that the sphere remains in static equilibrium. What is the frictional force of the incline on the sphere?
- Relevant Equations
- ##\sum{\tau} = 0 ##
##\sum{F} = 0 ##
So if I understand correctly the forces acting on the sphere are ##\vec{F}##, the normal force, friction, and the weight of the sphere. In order for the conditions of static equilibrium to be met the net torque must be zero.
The torque about the center of the sphere created by the normal force, the weight force, and ##\vec{F}## are all zero because the angle between their position vectors and themselves are zero (rFsin0 = 0). The only other force is friction which acts along the incline. So if friction is nonzero, then net torque is nonzero which contradicts the premises of the question?
Any help is appreciated.
The torque about the center of the sphere created by the normal force, the weight force, and ##\vec{F}## are all zero because the angle between their position vectors and themselves are zero (rFsin0 = 0). The only other force is friction which acts along the incline. So if friction is nonzero, then net torque is nonzero which contradicts the premises of the question?
Any help is appreciated.