Juanda said:
I will try to apply it to the original mechanism from the OP without as much explanation since this is the reference post to understand the method.
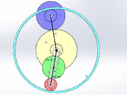
I marked the contact points in orange and the centers of rotation in grey.
For each contact point, we'll need a non-slip equation.
Notice how the rotation of the green and red gears around D is the same as the rotation of the transparent carrier. However, that's not the case for the blue gear.
I will keep talking about the gears with the same subindices as in a previous post.
Juanda said:
There are 6 bodies. From top to bottom, they are:
- Cyan gear ##\theta_c##, ##d_c##
- Blue gear ##\theta_b##, ##d_b##
- Big diameter ##d_{bb}## (EDIT: added)
- Small diameter ##d_{bs}## (EDIT: added)
- Yellow gear ##\theta_y##
- Big diameter ##d_{yb}##
- Small diameter ##d_{ys}##
- Transparent carrier ##\theta_t##, ##d_t##
- Green gear ##\theta_g##, ##d_g##
- Red gear ##\theta_r##, ##d_r##
In the previous example, the cross-product resulted in only one component in the vertical direction. Here, it's in the horizontal direction.
If the gears were at an arbitrary position where it's necessary to decompose the velocity in the horizontal and vertical direction, since you only care about the gear ratio, I'm fairly sure you could rotate your axis in the positive direction so you only have one component again and follow the same procedure as previously explained. Either that or solve the trigonometric system of equations resulting from the cross product. I haven't tried that though so it's only a hypothesis.
Point E
$$\overrightarrow{v}_{Ey}=\overrightarrow{\omega}_{y} \times \overrightarrow{r}_{ED} \rightarrow v_{Ey}= \omega_{y} r_{ys} \tag{1}$$
$$\overrightarrow{v}_{Eg}=\overrightarrow{\omega}_{g} \times \overrightarrow{r}_{EF}+
\overrightarrow{\omega}_{t} \times (\overrightarrow{r}_{ED}+\overrightarrow{r}_{FE})
\rightarrow
v_{Eg} = -\omega_{g} r_g + \omega_{t} (r_{ys}+r_g) \tag{2}$$
$$v_{Ey}=v_{Eg} \rightarrow \omega_{y} r_{ys} = -\omega_{g} r_g + \omega_{t} (r_{ys}+r_g) \tag{3}$$
Point G
$$\overrightarrow{v}_{Gg}=
\overrightarrow{\omega}_{g} \times \overrightarrow{r}_{GF}
+
\overrightarrow{\omega}_{t} \times (\overrightarrow{r}_{ED} + \overrightarrow{r}_{FE})
\rightarrow
v_{Gg} = \omega_{g} r_g +\omega_{t} (r_{ys} + r_g)
\tag{4}$$
$$\overrightarrow{v}_{Gr}=
\overrightarrow{\omega}_{r} \times \overrightarrow{r}_{GH}
+
\overrightarrow{\omega}_{t} \times (\overrightarrow{r}_{ED}+2\overrightarrow{r}_{FE}+\overrightarrow{r}_{HG})
\rightarrow
{v}_{Gr}=-\omega_r r_r + \omega_t (r_{ys}+2r_g+r_r)
\tag{5}$$
$$v_{Gg}=v_{Gr} \rightarrow \omega_{g} r_g +\omega_{t} (r_{ys} + r_g) = -\omega_r r_r + \omega_t (r_{ys}+2r_g+r_r)\tag{6}$$
Point I
$$\overrightarrow{v}_{Ir}=
\overrightarrow{\omega}_{r} \times \overrightarrow{r}_{IH}
+
\overrightarrow{\omega}_{t} \times (\overrightarrow{r}_{ED} + 2\overrightarrow{r}_{FE} + \overrightarrow{r}_{HG})
\rightarrow
v_{Ir} = \omega_{r} r_r +\omega_{t} (r_{ys} + 2r_g + r_r)
\tag{7}$$
$$\overrightarrow{v}_{Ic}=
\overrightarrow{\omega}_{c} \times (\overrightarrow{r}_{ED} + 2\overrightarrow{r}_{FE} + 2\overrightarrow{r}_{HG})
\rightarrow
v_{Ic}= \omega_{c} r_{c} \tag{8}$$
$$v_{Ir}=v_{Ic} \rightarrow \omega_{r} r_r +\omega_{t} (r_{ys} + 2r_g + r_r) = \omega_{c} r_{c}\tag{9}$$
Point C
$$\overrightarrow{v}_{Cy}=
\overrightarrow{\omega}_{y} \times \overrightarrow{r}_{CD}
\rightarrow
v_{Cy}= -\omega_{y} r_{yb} \tag{10}$$
$$\overrightarrow{v}_{Cb}=
\overrightarrow{\omega}_{b} \times \overrightarrow{r}_{CB}+
\overrightarrow{\omega}_{bD} \times (\overrightarrow{r}_{CD}+\overrightarrow{r}_{BC})
\rightarrow
v_{Cb} = \omega_{b} r_{bb} - \omega_{bD} (r_{yb}+r_{bb}) \tag{11}$$
Notice that in ##(11)## I had to introduce the rotation of the blue gear around the point D ##(\omega_{bD})##. Here there is no carrier so that new variable is necessary.
$$v_{Cy}=v_{Cb}\rightarrow -\omega_{y} r_{yb} = \omega_{b} r_{bb} - \omega_{bD} (r_{yb}+r_{bb}) \tag{12}$$
Point A
$$\overrightarrow{v}_{Ab}=
\overrightarrow{\omega}_{b} \times \overrightarrow{r}_{AB}
+
\overrightarrow{\omega}_{bD} \times (\overrightarrow{r}_{CD} + \overrightarrow{r}_{BC})
\rightarrow
v_{Ab} = -\omega_{b} r_{bs} - \omega_{bD} (r_{yb} + r_{bb})
\tag{13}$$
$$\overrightarrow{v}_{Ac}=\overrightarrow{\omega}_{c} \times (\overrightarrow{r}_{CD}+\overrightarrow{r}_{BC}+\overrightarrow{r}_{AB})
\rightarrow
{v}_{Ac}=-{\omega}_{b} {r}_{c} \tag{14}$$
$$v_{Ab}=v_{Ac} \rightarrow -\omega_{b} r_{bs} - \omega_{bD} (r_{yb} + r_{bb}) = -{\omega}_{b} {r}_{c} \tag{15}$$
That's all. Way longer than I expected. Repetitive tasks like this are for computers. I would be surprised if I didn't introduce some typo as my eyes got tired.
The point is that with the equations ##(3)##, ##(6)##, ##(9)##, ##(12)## and ##(15)## everything should be defined.
I didn't end up using the paper you provided but I'm fairly confident about this result. Let me know if you find any errors.