gionole
- 281
- 24
I feel like I might be posting many questions, so I hope you're not angry with me on this.
I'm following Landau's book and try to understand why L = K - U but first we need to figure out why it contains K.
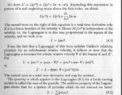
Landau discusses two inertial frames where the speed of one frame relative to another is ##\epsilon##.
He mentions:
frame 1: ##L(v^2)##
frame 2: ##L(\hat v^2) = L(v^2) + \frac{\partial L}{\partial v^2} 2v\epsilon##
Then he says ##\frac{\partial L}{\partial v^2}## must be independent of velocity in order to have ##L' = L + \frac{d}{dt}(q,\dot q)## where we can omit ##\frac{d}{dt}(q,\dot q)##.
Everything clear til now, but then he out of nowhere says that L must be proportional to ##\frac{1}{2}mv^2##.. I get why it contains ##v^2##, but why ##\frac{1}{2}m ## ? Note that at this point, he has no idea that L must contain kinetic energy(well, he might have, but whole idea of this derivation is to derive it without knowing things beforehand.
I'm attaching the image of his logic. I'd appreciate if you could explain in his words and not bring complex equations not related to what he says in there. The reason of this is since I'm following his book, I want to exactly know his thought process and don't want to prove it with other methods. Why ##\frac{1}{2}m## ? If I could say ##\frac{1}{4}m##, what would go wrong ? other than the fact that in the end, he would solve it with euler lagrange and get a wrong equation ? he must have had the reason to exactly come up with ##\frac{1}{2}m##
Hope, I'm not too big of a pain. and thanks for all the help. This forum is amazing.
I'm following Landau's book and try to understand why L = K - U but first we need to figure out why it contains K.
Landau discusses two inertial frames where the speed of one frame relative to another is ##\epsilon##.
He mentions:
frame 1: ##L(v^2)##
frame 2: ##L(\hat v^2) = L(v^2) + \frac{\partial L}{\partial v^2} 2v\epsilon##
Then he says ##\frac{\partial L}{\partial v^2}## must be independent of velocity in order to have ##L' = L + \frac{d}{dt}(q,\dot q)## where we can omit ##\frac{d}{dt}(q,\dot q)##.
Everything clear til now, but then he out of nowhere says that L must be proportional to ##\frac{1}{2}mv^2##.. I get why it contains ##v^2##, but why ##\frac{1}{2}m ## ? Note that at this point, he has no idea that L must contain kinetic energy(well, he might have, but whole idea of this derivation is to derive it without knowing things beforehand.
I'm attaching the image of his logic. I'd appreciate if you could explain in his words and not bring complex equations not related to what he says in there. The reason of this is since I'm following his book, I want to exactly know his thought process and don't want to prove it with other methods. Why ##\frac{1}{2}m## ? If I could say ##\frac{1}{4}m##, what would go wrong ? other than the fact that in the end, he would solve it with euler lagrange and get a wrong equation ? he must have had the reason to exactly come up with ##\frac{1}{2}m##
Hope, I'm not too big of a pain. and thanks for all the help. This forum is amazing.