Juanda
Gold Member
- 439
- 146
- TL;DR
- When the reactions depend on the displacements the problem cannot be solved with the typical tools from statics. What tools should I use?
In some problems, there is a dependency between the reactions at the supports and the displacements due to the deformations. In such cases, typical tools from statics and resistance of materials cannot be used. I believe that is because one of the main assumptions is that only very small deformations will happen.
What is the name for problems where this dependency exists? Do you recommend a particular book about them?
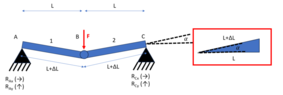
Let's start with a simple example.

This problem is statically undetermined because the 3 equations of equilibrium are not enough to find the reactions but that's not the point. The point is that those rods can only work axially because it's a truss with forces only in the articulations so to counteract ##{\color{Red} F}## that has a vertical component (and only a vertical component in this simple example) they will need to change their orientation so that the axial internal forces have a vertical component too.
The problem can be solved by finding the relation between the internal axial forces in the beam and the deformation of the system.

Now using the equilibrium of vertical forces at the joint B it is possible to find the reactions, internal forces, elongation, and the angle the system will adopt.
##\sum F_y=0 \rightarrow -F+N_{1_y}+N_{2_y}=0 \left \{ Symmetry \rightarrow N_{1_y}=N_{2_y}=N_y;N_y=Nsin(\alpha);N=k\Delta L\right \} \rightarrow##
##\rightarrow F=2k\Delta L\sin\alpha##
That's still not enough because in that equation we don't know 2 variables ##(\Delta L, \alpha)##. However, it is possible to link them.

##(L+\Delta L)\cos\alpha = L\rightarrow \Delta L = \frac{L}{\cos\alpha}-L##
Then, by combining the two previous equations, it is possible to have only 1 variable to solve.
##F=2k\Delta L\sin\alpha\rightarrow F=2k(\frac{L}{\cos\alpha}-L)\sin\alpha\rightarrow \frac{F}{2KL}=\tan\alpha-\sin\alpha##
I'm pretty sure that trigonometric equation cannot be solved analytically so I will leave it there. The point is that it can be solved and the system is fully defined. As a sanity check, as ##\alpha \rightarrow 0## it seems like the equation fails. However, if ##\alpha \rightarrow 0## is because then ##k\rightarrow \infty ## so we have a ##\infty \times 0## situation which can spit ##F## as a result.
So the problem is solvable. However, the procedure is very different when comparing it with the linear problems we typically see in books on Static and Resistance of Materials. Even for this simple case, I'm not certain I could solve it if I got rid of all the symmetries. Is there an established way to solve these types of problems/structures?
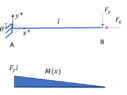
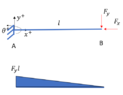
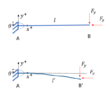
Another case that could be interesting to solve is the following

I don't know if that's related to how the formulas for buckling are derived but I doubt it because when checking for buckling, at no point the reaction moment ##M_{A_z}## is considered. Is this maybe an alternative way of checking for buckling? The point is that as ##\delta x ## increases, the reaction ##M_{A_z}## needs to grow as well to compensate ##F \delta x## so we have a problem where again the reactions depend on the displacements. I tried solving this problem with no luck so far.
Do you know the standard procedure to solve it? Or books that cover this?
What is the name for problems where this dependency exists? Do you recommend a particular book about them?
Let's start with a simple example.
This problem is statically undetermined because the 3 equations of equilibrium are not enough to find the reactions but that's not the point. The point is that those rods can only work axially because it's a truss with forces only in the articulations so to counteract ##{\color{Red} F}## that has a vertical component (and only a vertical component in this simple example) they will need to change their orientation so that the axial internal forces have a vertical component too.
The problem can be solved by finding the relation between the internal axial forces in the beam and the deformation of the system.
Now using the equilibrium of vertical forces at the joint B it is possible to find the reactions, internal forces, elongation, and the angle the system will adopt.
##\sum F_y=0 \rightarrow -F+N_{1_y}+N_{2_y}=0 \left \{ Symmetry \rightarrow N_{1_y}=N_{2_y}=N_y;N_y=Nsin(\alpha);N=k\Delta L\right \} \rightarrow##
##\rightarrow F=2k\Delta L\sin\alpha##
That's still not enough because in that equation we don't know 2 variables ##(\Delta L, \alpha)##. However, it is possible to link them.
##(L+\Delta L)\cos\alpha = L\rightarrow \Delta L = \frac{L}{\cos\alpha}-L##
Then, by combining the two previous equations, it is possible to have only 1 variable to solve.
##F=2k\Delta L\sin\alpha\rightarrow F=2k(\frac{L}{\cos\alpha}-L)\sin\alpha\rightarrow \frac{F}{2KL}=\tan\alpha-\sin\alpha##
I'm pretty sure that trigonometric equation cannot be solved analytically so I will leave it there. The point is that it can be solved and the system is fully defined. As a sanity check, as ##\alpha \rightarrow 0## it seems like the equation fails. However, if ##\alpha \rightarrow 0## is because then ##k\rightarrow \infty ## so we have a ##\infty \times 0## situation which can spit ##F## as a result.
So the problem is solvable. However, the procedure is very different when comparing it with the linear problems we typically see in books on Static and Resistance of Materials. Even for this simple case, I'm not certain I could solve it if I got rid of all the symmetries. Is there an established way to solve these types of problems/structures?
Another case that could be interesting to solve is the following
I don't know if that's related to how the formulas for buckling are derived but I doubt it because when checking for buckling, at no point the reaction moment ##M_{A_z}## is considered. Is this maybe an alternative way of checking for buckling? The point is that as ##\delta x ## increases, the reaction ##M_{A_z}## needs to grow as well to compensate ##F \delta x## so we have a problem where again the reactions depend on the displacements. I tried solving this problem with no luck so far.
Do you know the standard procedure to solve it? Or books that cover this?
Attachments
Last edited: