Discussion Overview
The discussion revolves around calculating the torque required to rotate a disk (referred to as the blue plateau) loaded with 7.5 kg, with a radius of 100 mm. Participants explore the implications of moment of inertia, bearing friction, and the mechanical setup involved in the rotation, including considerations of static and dynamic friction.
Discussion Character
- Exploratory
- Technical explanation
- Conceptual clarification
- Debate/contested
- Mathematical reasoning
Main Points Raised
- Some participants assert that any amount of torque can rotate the disk if it is frictionless, while others emphasize the need to overcome static friction if present.
- There is discussion about the moment of inertia contributed by the 7.5 kg load and how it affects the torque required for rotation.
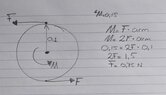
- One participant calculates the torque needed assuming a frictionless scenario, providing specific values for angular acceleration and moment of inertia.
- Concerns are raised about the type of bearings used and their friction characteristics, with questions about whether the disk rests on frictionless bearings or not.
- Participants discuss the importance of accurately describing the mechanical setup, including the distribution of mass and the configuration of the components involved.
- There is a call for clarity regarding the coefficients of static and dynamic friction, and how they relate to the torque calculations.
- One participant provides a detailed description of the mechanical setup, including materials and dimensions, while seeking feedback on their understanding.
Areas of Agreement / Disagreement
Participants express differing views on the role of friction in the torque calculations, with some asserting that friction must be accounted for while others suggest that torque can be calculated under the assumption of frictionless conditions. The discussion remains unresolved regarding the exact torque needed due to the various assumptions about friction and mechanical configuration.
Contextual Notes
Limitations include the lack of specific measurements for bearing friction, the distribution of mass on the disk, and the need for a clear understanding of the mechanical setup to accurately compute the moment of inertia and required torque.
Who May Find This Useful
This discussion may be useful for individuals interested in mechanical engineering, physics, or anyone involved in designing systems that require torque calculations for rotating components.