member 731016
- Homework Statement
- Pls see below
- Relevant Equations
- Pls see below
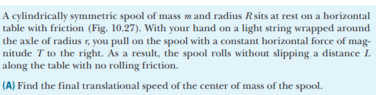
For this problem,


I have a few confusions:
(a): Why can't we use the UAM equations? Is it because the spool cannot be approximated as a point particle as it is cylinder not a sphere?
(b): I don't understand their statement about that the point of application of the force of static friction dose not move though a displacement so dose no work. To me it looks like it the point of application of static friction moves though almost the same displacement as the point of application of tension (apart from the fact they are different distances from the AoR)
(c): Why do they not include the force of friction in the net work energy theorem statement? I thought that ##W = F_{net} \times \vec r## and you don't have to take into account whether each force acting on the object is part of what causes the displacement. It seems like they did not take into account the static friction for in their energy statement even though it is a force making up the net force acting on the spool
(d) Is there a way to prove that the hand dose indeed move a distance ##l + L##?
Many thanks!
I have a few confusions:
(a): Why can't we use the UAM equations? Is it because the spool cannot be approximated as a point particle as it is cylinder not a sphere?
(b): I don't understand their statement about that the point of application of the force of static friction dose not move though a displacement so dose no work. To me it looks like it the point of application of static friction moves though almost the same displacement as the point of application of tension (apart from the fact they are different distances from the AoR)
(c): Why do they not include the force of friction in the net work energy theorem statement? I thought that ##W = F_{net} \times \vec r## and you don't have to take into account whether each force acting on the object is part of what causes the displacement. It seems like they did not take into account the static friction for in their energy statement even though it is a force making up the net force acting on the spool
(d) Is there a way to prove that the hand dose indeed move a distance ##l + L##?
Many thanks!