Demystifying Parameterization and Surface Integrals
Table of Contents
Introduction
This article will attempt to take the mystery out of setting up surface integrals. It will explain the basic ideas underlying surface integration and show you how to parameterize surfaces to set up the corresponding integrals efficiently. You will need to have had or be taking ##3D## calculus covering multiple integrals to get the most out of this presentation. The focus is on how to set up the integrals but not so much on techniques of evaluating them.
Vector functions giving space curves
Readers will be familiar with the vector function $$\vec R(t)= \langle x(t),y(t) \rangle = \langle 2\cos t, 2\sin t\rangle,~0\le t \le 2\pi$$which maps the ##t## interval ##I=[0,2\pi]## onto a circle of radius ##2## in the ##x,y## plane. Here, the value of the single independent variable ##t## determines the location of a point on the circle. I will call the interval ##I## the “parameter space”.
Similarly, a vector function of the form$$\vec R(t) = \langle x(t),y(t),z(t)\rangle,~a \le t \le b$$defines a space curve in ##3## dimensions. For example, if we add a third component of ##t## to the ##2D## vector function above$$\vec R(t)= \langle x(t),y(t),z(t) \rangle = \langle 2\cos t, 2\sin t,t\rangle,~a\le t \le b$$we get a portion of a space curve called a helix. Again, the parameter space is the ##t## interval ##[a,b]##.
Recall that the derivative ##\vec R'(t)## gives a tangent vector to the curve and ##|\vec R'(t)| =\frac {ds}{dt}##, the rate of change of arc length along the curve.
Vector functions giving surfaces
Now let’s consider a ##3D## vector function which has two parameters. The general form would be$$\vec R(u,v) = \langle x(u,v),y(u,v),z(u,v)\rangle,~(u,v)\in A$$where ##A## is a region in the ##u,v## plane. Now, the parameter space is the planar region ##A## in the ##u,v## plane.
To visualize this, let’s assume ##A## is a rectangular region given by ##a \le u \le b,~c \le v \le d## and it is mapped by the vector function $$\vec R(u,v) = \langle x(u,v),y(u,v),z(u,v)\rangle$$into ##3D## coordinate space. Here is a generic picture of the situation:
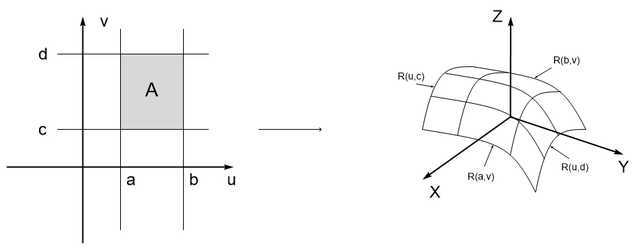
Notice that if you hold one variable in ##\vec R(u,v)## constant and let the other vary, you get a space curve on the surface. For example, if you let ##u = a## and ##v## vary from ##c## to ##d##, the left edge of ##A## is mapped to the lower-left surface edge in the figure. I will call such curves, where one parameter is held constant, “parameter curves”. Some authors call them “curvilinear coordinates”. Of course, the actual shape of the surface depends on the particular formulas for ##x,~y,##, and ##z##. Note that even though the surface exists in ##3D## space, it is two-dimensional in the sense that you need only to know the two parameters ##u## and ##v## to locate a point on the surface.
The element of surface area
Suppose we examine a point ##\vec R(u,v)## on the surface and the parameter curves through ##\vec R(u + \Delta u,v)## and ##\vec R(u, v+\Delta v)## as well as the tangent vectors ##\vec R_u(u,v)## and ##\vec R_v(u,v)##.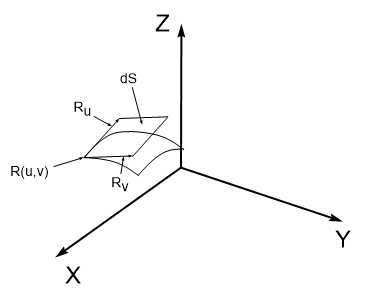
The tangent vectors form the sides of a parallelogram tangent to the surface whose area is ##|\vec R_u \times \vec R_v|##. This tells us that a rectangle in the ##u,v## plane with small sides ##\Delta u## and ##\Delta v## with area ##\Delta u \cdot \Delta v## is mapped to a region ##\Delta S## on the surface whose area is approximated by ##|\vec R_u \times \vec R_v|\Delta u\Delta v##. For this reason the element of surface area is defined to be$$dS = |\vec R_u \times \vec R_v|dudv$$and I will refer to ##|\vec R_u \times \vec R_v|## as the “scaling factor” of the transformation. This formula is important because surface integrals are always evaluated by calculating in the parameter space.
OK, so how do I use it?
A typical text exercise about surface area might be: Find the area of the portion of the plane ##6x+y+3z = 12## in the first octant. The first step is to parameterize the surface, which might be as simple as picking which two variables to use for parameters. The logical parameters to use almost always are related to the geometry of the problem, and they won’t usually be called ##u## and ##v##.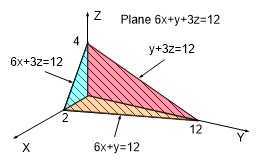 In this case, we can easily solve for any variable in terms of the other two, but the simplest is to solve for ##y## giving ##y = 12-6x-3z##. We are choosing ##x## and ##z## as the parameters so we can write our parameterization as ##\vec R(x,z) = \langle x,12-6x-3z,z\rangle##, and the parameter space is visible in the picture as the blue region.
In this case, we can easily solve for any variable in terms of the other two, but the simplest is to solve for ##y## giving ##y = 12-6x-3z##. We are choosing ##x## and ##z## as the parameters so we can write our parameterization as ##\vec R(x,z) = \langle x,12-6x-3z,z\rangle##, and the parameter space is visible in the picture as the blue region.
To calculate the area we set up the ##dzdx## integral over the blue region:$$\textrm{Area }S =\iint_S~dS = \iint_\textrm{Blue}|\vec R_x \times \vec R_z|~dzdx$$
##\vec R_x = \langle 1,-6,0\rangle## and ##\vec R_z=\langle 0,-3,1\rangle##. So ## |\vec R_x \times \vec R_z|## comes out ##\sqrt {46}##. So the final result comes out$$\textrm{Area} = \int_0^2 \int_0^{4-2x} \sqrt{46}~dzdx =4\sqrt{46}$$If you are so inclined, try it using a different pair of variables as your parameters.
Since the key to working on these kinds of problems is choosing appropriate parameterizations, the rest of this article will be several such examples.
Example 1.
Parameterize the part of the surface ##x = 4-y^2## where ##x\ge 0## and ##0\le z \le 3##.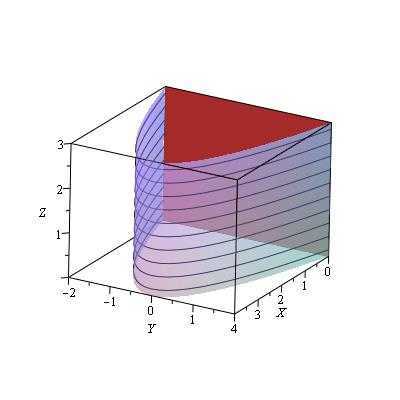 Notice that you can’t locate a point on the surface without knowing ##z##. So even though it is missing in the equation, it must be one of the parameters. The other can be either ##x## or ##y## but is easiest to solve for ##x## in terms of ##y##. So lets let ##x = 4-y^2,~y = y,~z = z## so our parameterization is ##\vec R(y,z) = \langle 4-y^2,y,z\rangle## and the parameter space is the ##yz## rectangle shown in brown. The area integral becomes$$S =\int_{-2}^2\int_0^3|\vec R_y \times \vec R_z|~dzdy =\int_{-2}^2\int_0^3\sqrt{1+4y^2}~dzdy$$This is not a particularly simple integral to evaluate. If it appeared in a textbook it would likely have a mass/area density ##\delta(x,y,z) = y## and you would be asked for its mass. The extra ##y## makes the integral much easier.
Notice that you can’t locate a point on the surface without knowing ##z##. So even though it is missing in the equation, it must be one of the parameters. The other can be either ##x## or ##y## but is easiest to solve for ##x## in terms of ##y##. So lets let ##x = 4-y^2,~y = y,~z = z## so our parameterization is ##\vec R(y,z) = \langle 4-y^2,y,z\rangle## and the parameter space is the ##yz## rectangle shown in brown. The area integral becomes$$S =\int_{-2}^2\int_0^3|\vec R_y \times \vec R_z|~dzdy =\int_{-2}^2\int_0^3\sqrt{1+4y^2}~dzdy$$This is not a particularly simple integral to evaluate. If it appeared in a textbook it would likely have a mass/area density ##\delta(x,y,z) = y## and you would be asked for its mass. The extra ##y## makes the integral much easier.
Example 2.
Find the lateral area of a cone of height ##h## and radius ##a##. The equation of this cone is ##z = \frac h a \sqrt{x^2 + y^2}##.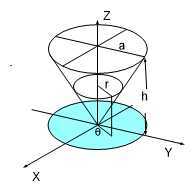 We can certainly use ##x## and ##y## as parameters and express the surface parametrically as$$\vec R(x,y) = \langle x,y,\frac h a \sqrt{x^2 + y^2}\rangle$$where the parameter space is the blue circle visible in the ##x,y## plane. To calculate ##dS## we need$$\vec R_x = \langle 1,0,\frac{hx}{a\sqrt{x^2+y^2}}\rangle,~\vec R_y = \langle 0,1,\frac{hy}{a\sqrt{x^2+y^2}}\rangle$$This gives$$dS=\frac{\sqrt{h^2+a^2}}{a}dydx$$so the surface area comes out$$S=\int_{-a}^a\int_{-\sqrt{a^2-x^2}}^\sqrt{a^2-x^2}\frac{\sqrt{h^2+a^2}}{a}~dydx = \frac{\sqrt{h^2+a^2}}{a}\cdot\textrm{area of circle} =\pi a \sqrt{a^2 + h^2}$$
We can certainly use ##x## and ##y## as parameters and express the surface parametrically as$$\vec R(x,y) = \langle x,y,\frac h a \sqrt{x^2 + y^2}\rangle$$where the parameter space is the blue circle visible in the ##x,y## plane. To calculate ##dS## we need$$\vec R_x = \langle 1,0,\frac{hx}{a\sqrt{x^2+y^2}}\rangle,~\vec R_y = \langle 0,1,\frac{hy}{a\sqrt{x^2+y^2}}\rangle$$This gives$$dS=\frac{\sqrt{h^2+a^2}}{a}dydx$$so the surface area comes out$$S=\int_{-a}^a\int_{-\sqrt{a^2-x^2}}^\sqrt{a^2-x^2}\frac{\sqrt{h^2+a^2}}{a}~dydx = \frac{\sqrt{h^2+a^2}}{a}\cdot\textrm{area of circle} =\pi a \sqrt{a^2 + h^2}$$
Note that if we didn’t already know the area of a circle, we would have an ##x,y## integral that we would probably want to change to polar coordinates to work. That suggests we might have used polar coordinates ##r,\theta## in the first place. If we do that we have$$\vec R(r,\theta) = \langle r\cos\theta,r\sin\theta,\frac h a r\rangle$$Now we have$$\vec R_r = \langle \cos\theta,\sin\theta,\frac h a\rangle,~\vec R_\theta = \langle -r\sin\theta,r\cos\theta,0\rangle$$If you calculate ##|\vec R_r\times \vec R_\theta |## you will get ##dS = \frac{\sqrt{a^2+h^2}}{a}rdrd\theta##, giving the area integral ##\int_0^{2\pi}\int_0^a \frac{\sqrt{a^2+h^2}}{a}rdrd\theta##, so it automatically comes out in polar coordinates for an easier integral and the same answer. Admittedly, calculating ##dS## is a bit more work the second way so it is a trade-off.
One thing to notice here — the parameter space ##r,\theta## is not visible in the picture, but the parameters ##r## and ##\theta## have geometric meaning. If you draw the parameter space it is just a rectangle ##0\le r \le a,~0 \le \theta\le 2\pi##.
Example 3
Consider a thin plate given by the portion of the surface ##z^2+y^2=9,~0\le x\le 5## in the first octant.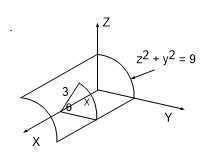 Let’s say the surface ##S## has an area density ##\delta(x,y,z)=xy## and we want to calculate its mass, which is given by the surface integral ##m = \iint_S \delta~dS##. To locate a point on the surface, we need know ##x##, and since a cross-section is circular, let’s use ##\theta## as in the figure. So we have$$\vec R(x,\theta)=\langle x,3\cos\theta,3\sin\theta \rangle$$ $$0\le x \le 5,~0\le \theta \le \frac \pi 2$$ Again, the parameter space has geometric meaning but is not directly visible in the figure. We have$$\vec R_x =\langle 1,0,0\rangle,~\vec R_\theta = \langle 0,-3\sin\theta,3\cos\theta\rangle$$This gives ##dS =|\vec R_x \times \vec R_\theta| dxd\theta =3dxd\theta##. The mass of the plate is given by$$m=\int_0^{\frac \pi 2}\int_0^5 3x\cos\theta~3dx d\theta = \frac{225} 2$$
Let’s say the surface ##S## has an area density ##\delta(x,y,z)=xy## and we want to calculate its mass, which is given by the surface integral ##m = \iint_S \delta~dS##. To locate a point on the surface, we need know ##x##, and since a cross-section is circular, let’s use ##\theta## as in the figure. So we have$$\vec R(x,\theta)=\langle x,3\cos\theta,3\sin\theta \rangle$$ $$0\le x \le 5,~0\le \theta \le \frac \pi 2$$ Again, the parameter space has geometric meaning but is not directly visible in the figure. We have$$\vec R_x =\langle 1,0,0\rangle,~\vec R_\theta = \langle 0,-3\sin\theta,3\cos\theta\rangle$$This gives ##dS =|\vec R_x \times \vec R_\theta| dxd\theta =3dxd\theta##. The mass of the plate is given by$$m=\int_0^{\frac \pi 2}\int_0^5 3x\cos\theta~3dx d\theta = \frac{225} 2$$
Retired Math Prof. (ASU)
http://math.asu.edu/~kurtz








I have wished we had a definition of a “partial differential” (and introduce the idea to my students) in the sense that given our position vector ##\mathbf{r}(u,v)## as a function of our two parameters, it is convenient to define the two “partial differentials” as the differential of the function treating all but one variable as constant:
[tex] d_u\mathbf{r} = \frac{\partial \mathbf{r}}{\partial u} du, \quad d_u\mathbf{r} = \frac{\partial \mathbf{r}}{\partial u} dv[/tex]
and thence:
[tex] d\mathbf{S} = d_u\mathbf{r}\times d_v\mathbf{r}[/tex]
That’s my wish as far as notation goes. When I teach Calc III, I teach my students the triple product first, as a “determinant” function of three vectors in 3 dimensions and then explain the cross product as the mapping from two vectors to the vector which dots with the third to have the same effect. (Hinting strongly at dual vectors and Riesz rep theorem). It makes the geometric interpretation more natural since the “determinant” is the orientation signed volume of the parallelopiped formed by the three vectors. When we then get to surface integrals they’ve (most of em) internalized this definition and the vector surface area element makes more sense (or so I hope).
”
Some very nice examples, but I am missing a discussion on the directed surface element ##d\vec S = \vec n \, dS##, where ##\vec n## is a unit normal. This is very important for flux integrals in general and for the divergence theorem in particular:
$$
\int_\Omega (\nabla\cdot \vec v) dV = \oint_{\partial\Omega} \vec v \cdot d\vec S.
$$
The discussion would also fit right in before ##dS = |\vec R_u \times \vec R_v|du\, dv##. Since the normal is orthogonal to both ##\vec R_u## and ##\vec R_v##, the directed surface element is just ##d\vec S = (\vec R_u \times \vec R_v) du\, dv## without the absolute value around the cross product. At least to me this feels like a more natural quantity than ##dS## and it is how I introduce the surface element when I teach vector analysis.
”
Hi Orodruin. I debated with myself about that and decided to leave the focus on the parameterization of surfaces. When I taught the course I spent the first lecture on parameterization, and on another day discussed flux integrals as an application. I do agree that the formula ##\hat ndS = \pm \vec R_u \times \vec R_v~dudv## is important and useful. Maybe I will eventually do a follow-up about that.
Some very nice examples, but I am missing a discussion on the directed surface element ##d\vec S = \vec n \, dS##, where ##\vec n## is a unit normal. This is very important for flux integrals in general and for the divergence theorem in particular:
$$
\int_\Omega (\nabla\cdot \vec v) dV = \oint_{\partial\Omega} \vec v \cdot d\vec S.
$$
The discussion would also fit right in before ##dS = |\vec R_u \times \vec R_v|du\, dv##. Since the normal is orthogonal to both ##\vec R_u## and ##\vec R_v##, the directed surface element is just ##d\vec S = (\vec R_u \times \vec R_v) du\, dv## without the absolute value around the cross product. At least to me this feels like a more natural quantity than ##dS## and it is how I introduce the surface element when I teach vector analysis.