
How to Tell Operations, Operators, Functionals, and Representations Apart
All these concepts belong to the toolbox of physicists. I read them quite often on our forum and their usage is sometimes a bit confusing. Physicists learn how to apply them, but occasionally I get the impression, that the concepts behind them are forgotten. So what are they? Especially when it comes to the adjoint representation in quantum field theory it is rarely distinguished which one is meant: the Lie group or the Lie algebra. Both have one and it is not the same! But why do they have an identical name? And what has it to do with operations? They are used like basic arithmetic is used. However, there is more to them, than only arithmetic. I have provided a list of textbooks at the end of this article because this terminology is so fundamental to physics and of enormous importance. Books can serve as good companions on these subjects throughout a lifetime, and you will more than once pick them from the shelf to read some chapters or look up important definitions and theorems. 1)
Table of Contents
Arithmetic Operations and the division by zero
Everybody knows the basic arithmetic operators addition, subtraction, multiplication, and division. They connect two numbers and form a new one. Let’s consider the real numbers. We have two groups, one which we write with a ##+## sign and one with a ##\cdot ## sign. ‘Group’ here means we have associativity, a neutral, and an inverse element. The multiplicative group does not contain ##0##, so the question, of how to divide by zero doesn’t even arise at this level. Let’s write these two groups ##G_+## and ##G_*##. Now we all know how to mix these two operations. \begin{equation}\label{AO-I}
\begin{aligned}
G_* \times G_+ &\longrightarrow G_+ \\
(r,p) &\longmapsto r\cdot p
\end{aligned}
\end{equation}
There is a certain property that tells us how ##G_*## has to handle the group structure of ##G_+##
$$
(r,p+q) = (r,p) + (r,q) = r\cdot p + r \cdot q
$$
We call it the distributive law. It is an example of an operation of ##G_*## on ##G_+\,##. Here we have to define, how elements ##r \in G_*## deal with ##0 \in G_+##. The distributive law forces us to define ##r\cdot 0 = 0\,##. The interesting point is: There is still no need to even think about the division by zero. It simply does not occur in the concept. Strictly speaking, even ##0 \cdot 0## doesn’t occur. And if we’re honest, it isn’t needed at all. But ##0 \cdot 0 = 0## is forced by the distributive law, too. This is of course a rather algebraic point of view, but don’t we call these operations on real numbers algebra?
Other functions like $$(b,a) \longmapsto \log_b a\; , \; (a,n \longmapsto a^n)\; , \; (n,r)\longmapsto \sqrt[n]{r}\; , \;(n,k)\longmapsto \binom{n}{k}$$
can also be viewed as operations with certain rules.
Linear and Non-Linear Operators, Functionals, and Hilbert spaces
Operators are subject to functional analysis 2) . The terms are a bit confusing:
Operators are functions, functionals are certain operators, and functional analysis deals with operators in spaces, where the elements are functions.
O.k. so far? Let’s get some order in this mess. We start with the linear case.
Linear means we consider vector spaces over fields. Historically and from the point of view of applications, those fields are in general ##\mathbb{R}## or ##\mathbb{C}##. These are the most important ones and those which are well-suited to describe physical processes. The basic difference to linear algebra is, that our vectors are functions themselves: continuous functions, differentiable functions, bounded functions, or sometimes sequences. Those vector spaces are generally not finite-dimensional. However, they are so important, that we gave them names:
A real or complex vector space with a dot product ##\langle x,y \rangle## (scalar product, inner product) which induces a norm by ##||x|| = \sqrt{\langle x,x \rangle}## is called a Pre-Hilbert space and Hilbert space if it is complete, i.e. all Cauchy sequences converge. The latter means, if elements of a sequence get closer and closer to each other, then we can find a limit. This is the difference between the rational and the real numbers: we can find sequences of rationals, which get closer and closer towards ##\sqrt{2}## but this point doesn’t belong to the rational numbers. In the real numbers, it does. Therefore we call the real numbers complete and the rationals not. If we drop the requirement of a dot product and only want to consider a complete real or complex vector space with a norm, then we call it Banach space. Important examples are Lebesgue spaces, which deal with measurable subsets of ##\mathbb{R}^n##. 3) 4)
Now a linear operator ##L## is simply a linear map between vector spaces: ##L : V \rightarrow W##. The elements of ##V## on which ##L## is defined is the domain of ##L## and its image, i.e. the elements of ##W## which are hit by ##L## is the range or image of ##L## in its codomain ##W##. The only difference to linear algebra is, that if we say operator, then we usually mean (infinite-dimensional) Pre-Hilbert, Hilbert, or Banach spaces. 5) Certain classes of functions as those mentioned above form those vector spaces. If ##W## happens to be ##\mathbb{R}## or ##\mathbb{C}## then our operator ##L## is often called a functional. So in contrast to operations, where we have a pair of input parameters, we only have functions between vector spaces. The generally infinite dimension of the vector spaces, however, can make quite a difference for theorems and methods used in comparison to basic linear algebra. The scalar fields considered here are the real or complex numbers, which also is different from a purely algebraic point of view with eventually finite fields.
The main development of the algebra of the infinite was achieved in the 19th and early 20th century: “And, however unbelievable this may seem to us, it took quite a long time until it has been clear to mathematicians, that what the algebraists write as ##(I-\lambda L)^{-1}## for a matrix ##L##, is essentially the same as the analysts represent by ##I+\lambda L + \lambda^2 L^2 + \ldots ## for a linear operator ##L##.” 6)
In the non-linear case 7) , operators are (non-linear) functions between normed (in general infinite-dimensional) vector spaces (Banach spaces), and (non-linear) functionals are those which map to ##\mathbb{R}## or ##\mathbb{C}##.
Important operators in physics are (among others) the density operator, the position operator, the momentum operator or the Hamiltonian (Hamilton operator) or simply the differential ##\frac{d}{dx}##, the Volterra operator ##\int_0^x dt ## or the gradient ##\nabla##. Sometimes entire classes of operators are considered, e.g. compact operators, which map bounded sets to those whose closure is compact.
Operations and Representations
The adjoint case
Here we are by real operations again, where the elements of one object (e.g. groups, rings, fields or algebras) transform elements of another object (e.g. sets, vector spaces, modules). This means we have an operation
\begin{equation}\label{OR-I}
\begin{aligned}
G \times V &\longrightarrow V \\
(g,v) &\longmapsto g.v
\end{aligned}
\end{equation}
A common example are matrix groups ##G## and vector spaces ##V## 8) where the operation is the application of the transformation represented by the matrix. A orthogonal matrix (representing a rotation)
\begin{equation}\label{OR-II}
\begin{aligned}
g = \begin{bmatrix}
\cos \varphi & -\sin \varphi \\
\sin \varphi & \cos \varphi
\end{bmatrix}
\end{aligned}
\end{equation}
transforms a two dimensional vector in its by ##\varphi## rotated version. Let’s consider – for the sake of simplicity – this example, i.e. ##G=SO(2,\mathbb{R})## is the group of rotations in the plane ##V=\mathbb{R}^2##. This is the major reason why operations are considered: Can we find out something either about ##G## or about ##V## by means of an operation, which we otherwise would have difficulties to examine? E.g. the operation of certain matrices on vector spaces are used to describe the spin of fermions. Thus as we did in our first example, we always have to tell, how the operating elements (##g \in G##) handle the structure of the set they operate on (##v \in V##). Of course only if there is a structure. In our example, the operation respects the vector space structure
\begin{equation}\label{OR-III}
\begin{aligned}
g.(\lambda v + \mu w) = \lambda (g.v) + \mu (g.w)
\end{aligned}
\end{equation}
It means it doesn’t matter if we rotate the result of an operation of vectors, or perform the operation after we rotated the components. The operation respects linearity and is called a linear operation. We will see that a similar is true if ##V## carries other structures as, e.g. a Lie algebra structure. We usually require the operation to have the properties inherited by the nature of objects we deal with linear operations on vector spaces, isometric operations on geometric objects, continuous (or differentiable) operations on continuous (or differentiable) functions, smooth operations on smooth manifolds, and so on. But in any case, we have to define how the objects have to be handled, especially their structure.
Important elements of an operation are orbits and stabilizers. An orbit of ##v\in V## is the set $$G.v = \{g.v \in V \,\vert \,g \in G\}$$
It is the set of all elements of ##V## which can be reached by the operation. In the case of groups ##G##, orbits are equivalence classes. If we can reach every point ##w## form any point ##v## by a certain group element, i.e. ##w \in G.v## for all ##v,w \in V\,,## then the operation is called transitive. Somehow corresponding to orbits are stabilizers, which are all elements of ##G## which leave a given element of ##V## unchanged, i.e. $$G_v = \{g \in G\,\vert \, g.v=v\}$$
In the case of groups, if only the neutral element stabilizes elements, i.e. ##G_v=\{e\}## for all ##v\in V##, the operation is called free. ##G## operates freely on ##V##. If only the neutral element ##e## fixes all ##v##, the operation is called faithful or injective. Free operations on non-empty sets are faithful.
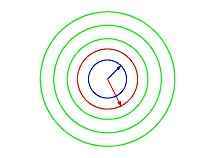
Let us consider our example and take ##v=(1,-2)## and ##w=(1,1)##. Then the orbit of ##v## is a circle with radius ##\sqrt{5}## and ##w## cannot be reached from ##v## by rotation, which means our operation is not transitive. We also see that an orbit doesn’t need to be a subspace. However, concentric circles are equivalence classes.
For the stabilizer, which is always a subgroup, we will have to be careful with the definition of ##G##. If we restrict ourselves to values ##\varphi \in [0,2 \pi) ## then we get a free operation, as only the rotation by ##0## stabilizes elements. But if we allow any real number as an angle, then ##G_v= 2\pi \mathbb{Z}##
If we generally consider a group ##G## which operates on a vector space ##V## we usually require the property (in this case being a group) to be respected. This means ##e.v=e## and ##g.(h.v) =(gh).v## and ##g^{-1}.g.v=v##. Now these properties can be summarized by saying
\begin{equation}\label{OR-IV}
\begin{aligned}
\varphi \, : \, G &\longrightarrow GL(V) \\
\varphi \, : \, g &\longmapsto (v \longmapsto g.v)
\end{aligned}
\end{equation}
is a group homomorphism, where ##GL(V)## is the general linear group of ##V##, the group of all regular linear functions ##V \longrightarrow V##. Homomorphism means, ##\varphi## maps group to group and ##\varphi(g\cdot h)=\varphi(g) \cdot \varphi(h)##. In this case ##V## is called representation space and ##\varphi## a representation of ##G##. Thus an operation and a representation are the same thing: it’s only a different way to look at it. One emphasizes the group side of it, the other the vector space side. 9) 10)
Let me finish with three important examples of representations that play a crucial role in the standard model of particle physics. Therefore let ##G## be a matrix group, e.g. a Lie group like the unitary group, and ##V## a vector space where this group applies to, e.g. ##\mathbb{C}^n##.
The first example is a pure group operation on itself
\begin{equation}\label{V}
\begin{aligned}
G \times G &\longrightarrow G\\
g.h &\longmapsto (ghg^{-1})
\end{aligned}
\end{equation}
Here ##G## operates not on a vector space, but on itself instead. A group element ##g## defines a bijective map from ##G## to ##G##, which is called conjugation or inner automorphism. If there is a Lie algebra ##\mathfrak{g}## associated with ##G##, as for matrix groups and in case of the unitary group, the skew-Hermitian matrices, we get from this conjugation a naturally induced map ##(g\in G\, , \,X\in \mathfrak{g})##
\begin{equation}\label{VI}
\begin{aligned}
\operatorname{Ad}\, : \,G &\longrightarrow GL(\mathfrak{g})\\
Ad(g)(X)&=gXg^{-1}
\end{aligned}
\end{equation}
which is called adjoint represenatation of ##G##.11)
Its representation space is now the Lie algebra ##\mathfrak{g}\,##, which is the tangent space of smooth functions in ##G## at the neutral element, the identity matrix, and as such a vector space. It further means, there is a group homomorphism ##\operatorname{Ad}## of matrix groups (Lie groups). Therefore ##GL(\mathfrak{g})## has also an associated Lie algebra, called the general linear Lie algebra ##\mathfrak{gl(g)}\,##, which is basically nothing else as all square (not necessarily regular) matrices the size of ##\operatorname{dim}\mathfrak{g}\,##. The Lie algebra multiplication is given by the commutator
$$
[X,Y] = X \cdot Y – Y \cdot X
$$
The left multiplication in ##\mathfrak{g}## gives rise to a Lie algebra operation
\begin{equation}\label{VII}
\begin{aligned}
\varphi\, : \,\mathfrak{g} \times \mathfrak{g} & \longrightarrow \mathfrak{g}\\
(X,Y) &\longmapsto [X,Y]
\end{aligned}
\end{equation}
Remember that we said an operation is required to respect the structure. Here it means, that ##\varphi## is a Lie algebra homomorphism
$$
\varphi([X,Y])(Z) = [\varphi(X),\varphi(Y)](Z)=\varphi(X)\varphi(Y)(Z)-\varphi(Y)\varphi(X)(Z)
$$
which is nothing else than the Jacobi identity. Furthermore, as an operation is always a representation, we get a representation
\begin{equation}\label{VIII}
\begin{aligned}
\operatorname{ad}\, : \,\mathfrak{g}&\longrightarrow \mathfrak{gl(g)}\\
\operatorname{ad}(X)(Y)& = \varphi(X,Y) = [X,Y]
\end{aligned}
\end{equation}
which is called adjoint representation of ##\mathfrak{g}\,##.12) It’s simply the left-multiplication in the Lie algebra. The homomorphism property, which is the Jacobi identity, is also the defining property of a derivation:
$$
\operatorname{ad}([X,Y])= [\operatorname{ad}(X),Y]+[X,\operatorname{ad}(Y)]
$$
Therefore the adjoint representation ##\operatorname{ad}## is also called an inner derivation of ##\mathfrak{g}\,##; the same as a conjugation is called an inner automorphism of ##G##. Both adjoint representations, the one of ##G## and the one of ##\mathfrak{g}## are related by the following formula ##(X \in \mathfrak{g})##
\begin{equation}\label{IX}
\begin{aligned}
\operatorname{Ad}(\exp(X)) = \exp(\operatorname{ad}(X))
\end{aligned}
\end{equation}
The defining property for a derivation is just the Leibniz rule of differentiation (product rule). Also closely related are the Lie derivative and the Levi-Civita connection. In the end, all of them are just versions of the Leibniz rule we learned at school.
Summary
- Arithmetic operations: ##+\; , \;-\; , \;\cdot \; , \; :##
- (Linear) Operators: ##L : (V,||.||_V) \longrightarrow (W,||.||_W)##
- (Linear) Functionals: ##L : (V,||.||_V) \longrightarrow (\mathbb{R},|.|_\mathbb{R}) ## or ##(\mathbb{C},|.|_\mathbb{C}) ##
- Operation in general: ##Operator\,.\,Object_{old} = Object_{new}##
- Group Operations: ##G \times V \longrightarrow V##
- Group Representation: ##G \longrightarrow GL(V)##
- Conjugation in groups: ##g.h = ghg^{-1}##
- Adjoint representation for Lie groups: ##\operatorname{Ad} g(X) = gXg^{-1}##
- Adjoint representation for Lie algebras: ##\operatorname{ad} X(Y) = [X,Y]##
- ##\operatorname{Ad}\circ \exp = \exp \circ \operatorname{ad}##
Sources
Sources
1) I know, if you bought all the books recommended here, it would be at the expense of a little fortune. However, all of them represent valuable sources that can be taken as the foundation of a good personal library. Especially Humphreys and Zeidler are well suited for beginners. ##\uparrow##
2) E. Zeidler: Applied Functional Analysis: Main Principles and Their Applications, Springer, 1995, AMS 109
https://www.amazon.de/Applied-Functional-Analysis-Applications-Mathematical/dp/0387944222 ##\uparrow##
3) E. Hewitt, K. Stromberg: Real and Abstract Analysis, Springer 1965, GTM 25
https://www.amazon.com/Abstract-Analysis-Graduate-Texts-Mathematics/dp/0387901388/ ##\uparrow##
4) J. Weidmann: Linear Operators in Hilbert Spaces, Springer, 1980, GTM 68
https://www.amazon.com/Linear-Operators-Hilbert-Graduate-Mathematics/dp/0387904271/ ##\uparrow##
5) M. Reed, B. Simon: Functional Analysis, AP, 1981, Methods of Modern Mathematical Physics, Volume 1
https://www.amazon.de/Methods-modern-mathematical-physics-Functional/dp/0125850506 ##\uparrow##
6) Jean Dieudonné, Geschichte der Mathematik 1700-1900, Vieweg Verlag 1985 ##\uparrow##
7) E. Zeidler: Nonlinear Functional Analysis and its Applications, Springer, 1985-1990, Volumes: ##\uparrow##
- Fixed-Point Theorems, 1986, Vol. I
- Linear Monotone Operators, 1990, Vol. II/A
- Nonlinear Monotone Operators, 1990, Vol. II/B
- Variational Methods and Optimization 1985, Vol. III
- Applications to Mathematical Physics, 1988, Vol. IV
8) J.E. Humphreys: Linear Algebraic Groups, Springer, 1981, GTM 21
https://www.amazon.com/Linear-Algebraic-Groups-Graduate-Mathematics/dp/0387901086/ ##\uparrow##
9) B.L. van der Waerden: Algebra Volume I, Springer, 1991
https://www.amazon.com/Algebra-I-B-L-van-Waerden/dp/0387406247 ##\uparrow##
10) R. Lidl, G. Pilz: Applied Abstract Algebra, Springer, 1998, UTM
https://www.amazon.com/Applied-Abstract-Algebra-Undergraduate-Mathematics/dp/0387982906/ ##\uparrow##
11) V.S. Varadarajan: Lie Groups, Lie Algebras, and Their Representations, Springer, 1984, GTM 102
https://www.amazon.com/Groups-Algebras-Representation-Graduate-Mathematics/dp/0387909699 ##\uparrow##
12) J.E. Humphreys: Introduction to Lie Algebras and Representation Theory, Springer, 1972, GTM 9
https://www.amazon.com/Introduction-Algebras-Representation-Graduate-Mathematics/dp/0387900535 ##\uparrow##
13) https://www.physicsforums.com/insights/representations-precision-important/

Maybe I'll also ask you about the ##i## which mathematically turns a homomorphism into an anti-homomorphism but nobody ever cares. I understand that it doesn't change representations qualitatively, nevertheless I find it a bit sloppy, e.g. when Pauli matrices are used.When [itex]G[/itex] is a (Lie) symmetry group of the physical system, the dynamical variables of the system transform in some unitary representation [itex]rho[/itex] of [itex]G[/itex], and the “infinitesimal generators” in the representation [itex]rho[/itex] are (either directly or indirectly via Noether theorem) represent the observables of the system, i.e., the real quantities (numbers) that we measure in the Lab. In quantum mechanics, observables are represented by Hermitian operators/matrices. So, we need those generators to be Hermitian not the anti-hermitian that are used in the mathematical literatures: In some coordinates [itex]alpha^{a}[/itex] on the group manifold we may use the exponential map and write [tex]rho(g) = e^{alpha^{a} left( d rho (X_{a})right)} .[/tex] But [itex]d rho (X_{a})[/itex] is not good for us, so we instead define the hermitian generators by [tex]i d rho (X_{a}) = J_{a} ,[/tex] and rewrite [tex]rho (g) = e^{- i alpha^{a} J_{a}} .[/tex] In field theory, Noether theorem dresses these [itex]J_{a}[/itex]’s by the dynamical pair [itex](varphi^{r} , pi_{r})[/itex], giving us the so-called Noether charges. These are Lorentz scalar and time-independent (i.e., conserved) objects given by [tex]Q_{a} = int_{mathbb{R}^{3}} d^{3}x pi_{r} (x) J_{a} varphi^{r}(x) .[/tex] In this case, and to annoy you more, we actually call the Noether charges the generators of the symmetry group of the transformations in the unitary representation [itex]rho (G)[/itex]. The reason for term infinitesimal generators is natural in this case because these [itex]Q_{a}[/itex]’s do actually generate the correct infinitesimal transformations on the dynamical variables [tex]delta_{a}varphi^{r} (x) = [i Q_{a} , varphi^{r}(x)] ,[/tex] and satisfy the Lie algebra of the group [itex]G[/itex] [tex][Q_{a} , Q_{b}] = i C_{ab}{}^{c} Q_{c} .[/tex]
In physics, an infinitesimal generator (mostly of a symmetry group) is related to what mathematicians call a derivation or vector field. We always speak of infinitesimal generators of a group and its representations….Thank you. It drove me nuts what exactly a generator is meant to be. On all occasions I have seen it here, nobody ever explained it and in 90% of the cases I got the impression, that the poster himself wasn't sure. I have a 400 pages thick book about Lie groups, but Varadarajan doesn't mention "generator" at all. Maybe in the context of one-parameter subgroups, not quite sure. I bookmarked your post so I can look it up for details next time I'll try to understand someone speaking of generators or quote it as reference here. But I think I've understood the point. I'm coming from the algebraic side of it, and in this contexts, they are simply vectors and what matters alone is, in which vector space, algebra, vector field or bundle. An information which is basically never given explicitly.
Maybe I'll also ask you about the ##i## which mathematically turns a homomorphism into an anti-homomorphism but nobody ever cares. I understand that it doesn't change representations qualitatively, nevertheless I find it a bit sloppy, e.g. when Pauli matrices are used.
…..
And this is the point where this "infinitesimal generator" terminology loses me:In physics, an infinitesimal generator (mostly of a symmetry group) is related to what mathematicians call a derivation or vector field. We always speak of infinitesimal generators of a group and its representations. So, in this sense [itex]mathfrak{g}[/itex] is the infinitesimal generator of [itex]G[/itex], [itex]mbox{ad}[/itex] is the infinitesimal generator of [itex]mbox{Ad}[/itex], and more generally, for simply connected Lie group [itex]G[/itex], [itex]mbox{d}pi[/itex] is the infinitesimal generator of [itex]G[/itex] in the representation [itex]pi[/itex].
The group of automorphisms ( [itex]t to alpha_{t}[/itex]) of a [itex]C^{*}[/itex]-algebra, [itex]mathcal{A}[/itex], has an infinitesimal generator given by [tex]delta (A) = lim_{t to 0} frac{alpha_{t}(A) – A}{t} ,[/tex] with natural domain [tex]D(delta) ={ forall A in mathcal{A} | lim_{t to 0}t^{-1}(alpha_{t}(A) – A) mbox{exist} } .[/tex]
Clearly [itex]delta (A)[/itex] is a *-derivation, i.e., linear operation which commutes with complex conjugation/adjoint, [itex]left(delta (A) right)^{*} = delta ( A^{*})[/itex], and satisfies the Leibnitz rule. Indeed, writing [tex]frac{1}{t}left( alpha_{t}(AB) – ABright) equiv frac{1}{t}left( alpha_{t}(A) – Aright) cdot B + alpha_{t}(A) cdot frac{1}{t} left( alpha_{t}(B) – Bright) ,[/tex] and taking the limit, we get [tex]delta(AB) = delta (A) cdot B + A cdot delta (B) .[/tex]
In QM, the algebra [itex]mathcal{A}[/itex] is given by [itex]B(mathcal{H})[/itex], the algebra of bounded operators on separable Hilbert space. In this case one can show that for every 1-parameter group of automorphisms of [itex]B(mathcal{H})[/itex] (continuous in the weak operator topology), there exists a 1-parameter group of unitary operators [itex]U(t) = e^{iHt}[/itex] (continuous in the weak topology) such that [tex]alpha_{t}(A) equiv A(t) = e^{iHt} A e^{-iHt} .[/tex] Here, we have the so-called inner derivation [tex]delta_{H}(A) = i[H , A],[/tex] with domain [tex]D(delta_{H}) = { forall A in B(mathcal{H}) | [H,A] mbox{is dense} } .[/tex] When the derivation [itex]delta[/itex] is inner derivation [itex]delta_{X}[/itex], we call [itex]X[/itex] the infinitesimal generator. The same extends to every representation [itex]rho[/itex] of a [itex]C^{*}[/itex]-algebra on the Hilbert [itex]mathcal{H}_{rho}[/itex], [tex]rho(delta_{H}(A)) = i [H_{rho} , rho (A)], rho (A) in D(delta) .[/tex] In this case, we call [itex]H_{rho}[/itex] the infinitesimal generator of the group of automorphisms in the representation [itex]rho[/itex].
Great article Fresh!
Ok, I think it's slowly starting to come into focus for me. I just need to play around with it for a little while. Thanks for your help.
Ok, thanks so much for your insight. I have another stupid question: If I understand correctly, the adjoint representation of ##gin G## is given by ##gXg^{-1}##, where ##Xin mathfrak{g}##. Does this mean that each element ##Xin mathfrak{g}## generates its own unique representation of the group ##G##? In other words, if we change ##X##, does that give us an entirely new representation of the group? Or is it the other way around: the action of a single element ##g## on all of the ##Xin mathfrak{g}## gives a representation of ##G##, so that each group element generates a unique representation of ##G##?No need to consider single elements here. It is all in all only one representation, the adjoint representation of the group ##G##. This means
$$
begin{align*}
G &longrightarrow GL(mathfrak{g}) \ g &longmapsto (X mapsto operatorname{Ad}_g(X)=gXg^{-1})\ &\
&text{ or written as action }\ &\
(G times mathfrak{g}) &longrightarrow mathfrak{g}\
end{align*}
$$
One says ##operatorname{Ad}## is the adjoint representation of the group ##G## on ##mathfrak{g}##.
This means, a single group element ##gin G## is represented by the single map ##operatorname{Ad}_g## which is an action on ##mathfrak{g}##. But this is only one element of the entire representation, which means all of ##{,operatorname{Ad}_g ,vert , gin G,}## form the representation ##operatorname{Ad}## because it is the same rule for all elements.
And this is the point where this "infinitesimal generator" terminology loses me: is it ##X , , ,operatorname{Ad}_g## or ##operatorname{Ad}_g(X),?## "Infinitesimal" indicates a tangent space, but ##X in mathfrak{g}, , ,operatorname{Ad}_g in mathfrak{gl}(mathfrak{g})## and ##operatorname{Ad}_g(X) in mathfrak{g}## so all of them are "infinitesimal". And if it's a tangent anyway, why do we have to use another name than vector or basis vector? And what is here generated? "Generator" indicates a kind of function, but ##X## and ##operatorname{Ad}_g(X)## are tangent vectors, which can be viewed as directional derivative, and ##operatorname{Ad}_g## is a function ##mathfrak{g} rightarrow mathfrak{g}##, so this "hint" is worthless.
And to complete the confusion, it is normally not told whether the adjoint representation of ##G## or the one of ##mathfrak{g}## is meant.
If we consider a single element ##g in G##, then ##{,operatorname{Ad}_g(X) = gXg^{-1} ,vert , X in mathfrak{g},}## is the orbit of ##g## with respect to the adjoint representation or equivalently according to the adjoint operation ( of ##G,##) on ##mathfrak{g}##.
If the adjective "adjoint" is not mentioned, then we don't have ##mathfrak{g}## as representation space (where the elements of ##G## act on) but an arbitrary, usually finite dimensional vector space ##V##, i.e. ##G longrightarrow GL(V)##. Such a representation is called irreducible, if ##V## cannot be written as ##V=U_1 oplus U_2## with ##g.U_i subseteq U_i## for all ##g in G,.##
In this case, however, care is requested. If ##G## is a matrix group, say ##G subseteq GL(mathbb{R}^n)## then we may have different operations, resp. representations here:
Ok, thanks so much for your insight. I have another stupid question: If I understand correctly, the adjoint representation of ##gin G## is given by ##gXg^{-1}##, where ##Xin mathfrak{g}##. Does this mean that each element ##Xin mathfrak{g}## generates its own unique representation of the group ##G##? In other words, if we change ##X##, does that give us an entirely new representation of the group? Or is it the other way around: the action of a single element ##g## on all of the ##Xin mathfrak{g}## gives a representation of ##G##, so that each group element generates a unique representation of ##G##?
I'm probably not the best person to answer this, because physicists do tend to get quite sloppy in their notation, and it's confusing to me as well. But I think typically you look for matrix representations of the infinitesimal generators of a Lie group (which I've always assumed must be elements of the corresponding Lie algebra). Since these are matrices, you can get a matrix representation of the corresponding Lie group simply by taking the matrix exponential (I'm pretty sure an additional requirement here is connectedness of the Lie group). As you can see, my knowledge of how all this hangs together is spotty at best.This would mean, the physicists strike back. If mathematicians call operations: actions, representations or even homomorphisms, then physicists call their tangent vectors, (left invariant) vector fields, tangent bundles, covariant derivative or infinitesimal generators, depending on the corresponding point of view? Fair enough.
I'm probably not the best person to answer this, because physicists do tend to get quite sloppy in their notation, and it's confusing to me as well. But I think typically you look for matrix representations of the infinitesimal generators of a Lie group (which I've always assumed must be elements of the corresponding Lie algebra). Since these are matrices, you can get a matrix representation of the corresponding Lie group simply by taking the matrix exponential (I'm pretty sure an additional requirement here is connectedness of the Lie group). As you can see, my knowledge of how all this hangs together is spotty at best.
Thanks for your response. There's a lot to unpack here. I'm sure I'll have other questions.Yes, we haven't talked about the representations of the Lie algebras. E.g. ##mathfrak{g} = mathfrak{su}(2) cong mathfrak{sl}(2)## for which all possible representations on vector spaces are known. Here we get a Lie algebra homomorphism ##mathfrak{sl}(2) longrightarrow mathfrak{gl}(V)## with a finite dimensional vector space ##V## of some dimension. The adjoint case ##operatorname{ad}## with ##V = mathfrak{g}## is only one example.
But perhaps you can tell me what is meant, if physicist speak of the adjoint representation: the one of the group, ##operatorname{Ad},,## or the one of the Lie algebra, ##operatorname{ad},?## And what are those generators? Are they basis vectors of weight spaces, basis vectors of a vector space ##V## where the group or the algebra acts on (which?), are they generating orbits, or are they the the group elements by which the conjugations are defined? Or are they the linear mappings ##operatorname{Ad}(g)## or ##operatorname{ad}(X)##? Which one? I read it so often but didn't find a mathematical explanation, yet. What is it and where lives it, that is generated here? I really want to know. I know it is some animal in the zoo, but which one? And then there are those Pauli matrices ##sigma##, where actually ##i cdot sigma## is the tangent vector. Not that it makes a difference for the concept, but it is confusing.
Thanks for your response. There's a lot to unpack here. I'm sure I'll have other questions.
This might be the wrong place to post this, but I was wondering about your inner automorphism example. In defining a representation ##varphi## (equation 5), you specifically look at the action of a group ##G## on a vector space ##V##. But then in the inner automorphism example, you have the group action of ##G## on itself: ##Gtimes G rightarrow G##, with the representation ##Ad: G rightarrow GL(mathfrak{g})##. But given the initial definition of a representation, shouldn't this be ##Ad: G rightarrow GL(G)##? Why do we get to substitute the Lie algebra ##mathfrak{g}## for the Lie group ##G##? Or alternatively, why doesn't the group ##G## act on the vector space ##mathfrak{g}##?To be able to speak of group action, all we need is – of course – a group ##G## and a set ##X## where the group acts on, resp. operates on. This is a function ##G times X longrightarrow X##. From here there can be various examples, depending on the nature of ##X##. As we have a group operation, ##X=G## is a natural example. So ##(g,x) mapsto L_g(x) = gcdot x## or ##(g,x) mapsto iota_g(x) = gcdot x cdot g^{-1}## are two possible actions of a group on itself. The latter defines an (inner) automorphism ##x mapsto gxg^{-1}## for every ##g##, i.e. we have a function ##G longrightarrow operatorname{Aut}(G)##. This can always be done.
Now if ##X=V## is a vector space, we have another situation, because a group is no vector space. (And usually the groups under consideration are not the additive groups which build the vector space.) First the operation ##(g,v) mapsto g.v in V## has to be defined. For an operation it is required that ##1.v=v## and ##(gcdot h).v = g.(h.v))## hold. These properties are the same as to say ##g mapsto (v mapsto g.v)## is a representation (of the group ##G## on the vector space ##V##) or ##G## operates on ##V## or ##G longrightarrow GL(V)## is a group homomorphism: three languages for the same thing. If we have a matrix group (like orthogonal or Hermitian transformations) of a vector space ##V## we get a representation in a natural way: matrix times vector = vector.
As to your question about the adjoint represenation. First of all: ##GL(G)## doesn't make sense. The "L" stands for linear and "G" doesn't carry a linear structure. We can say ##operatorname{Inn}(G)## for inner automorphisms, or ##operatorname{Aut}(G)## for simply automorphisms. In the case of conjugations like above we have ##G longrightarrow operatorname{Inn}(G) subseteq operatorname{Aut}(G)## by the map ##g mapsto iota_g##.
Let's now go back to a matrix group ##G## which simply means ##G subseteq GL(V)## for some vector space ##V##, i.e. ##G## consists of some kind of regular (here finite dimensional) matrices which apply to vectors from ##V##. As above we have an operation ##g mapsto iota_g## where ##iota_g(x)=gxg^{-1}## is the normal matrix multiplication of matrices ##g,x,g^{-1}##. In the language of group homomorphisms this means ##G longrightarrow operatorname{Aut}(G) subseteq operatorname{Aut}(GL(V))##.
If ##G## is a matrix group with Lie algebra ##mathfrak{g}##, we have the two things given needed: a group ##G## and a vector space ##mathfrak{g}## on which the group acts. The action, resp. operation is given by ##(g,X) mapsto gXg^{-1}## for ##gin G; , ;Xin mathfrak{g},.## In cases where ##G## and ##mathfrak{g}## are given, it is usually easy to see, that this defines a representation. The general case (##G## an analytic group and ##mathfrak{g}## its left-invariant vector fields) needs a little bit more care (cp. Varadarajan [11]). This operation is induced by the conjugation in ##G##, that is the group conjugations ##iota_g## can be extended to a conjugation of the vector fields and is called adjoint representationt of the Lie group ##G##.
… you have the group action of ##G## on itself: ##Gtimes G rightarrow G##, with the representation ##Ad: G rightarrow GL(mathfrak{g})##isn't precisely true. I have a group action (called conjugation, ##iota, : , G times Glongrightarrow G## ) on itself (no vector space), and I have a group action (called adjoint, ##operatorname{Ad}, : ,G times mathfrak{g}longrightarrow mathfrak{g}##) on its tangent space (vector space, resp. representation space). These are two different operations, and only the second is called a representation, although it is induced by the first, but it's another operation.
Although we have matrices here, i.e. linear transformations of a vector space ##V##, these vectors don't play any role so far. And of course this is confusing, as ##mathfrak{g}## are also matrices of the same dimension, which also apply to vectors of ##V##. However, this isn't even the end here, as ##mathfrak{g}## also operates on the vector space ##mathfrak{g}## by Lie left multiplication of the Lie algebra ##mathfrak{g}##, i.e.
$$
mathfrak{g} times mathfrak{g} longrightarrow mathfrak{g}\
(X,Y) longmapsto operatorname{ad}(X)(Y) = [X,Y]
$$
is a Lie algebra homomorphism, which is also called adjoint representation, as ##operatorname{ad}X## are inner derivations of ##mathfrak{g}.##
All three are connected by
I have tried to explain this mess earlier here:
https://www.physicsforums.com/insights/representations-precision-important/
This might be the wrong place to post this, but I was wondering about your inner automorphism example. In defining a representation ##varphi## (equation 5), you specifically look at the action of a group ##G## on a vector space ##V##. But then in the inner automorphism example, you have the group action of ##G## on itself: ##Gtimes G rightarrow G##, with the representation ##Ad: G rightarrow GL(mathfrak{g})##. But given the initial definition of a representation, shouldn't this be ##Ad: G rightarrow GL(G)##? Why do we get to substitute the Lie algebra ##mathfrak{g}## for the Lie group ##G##? Or alternatively, why doesn't the group ##G## act on the vector space ##mathfrak{g}##?
Can we give a good mathematical answer to the frequently asked question "What is the physical significance of operators?" ? (e.g. https://www.physicsforums.com/threads/what-are-operators.919653/ )I think the most obvious operator is the differential operator. It occurs naturally in physics, as an approximation of first order, as well as the description of change. More interesting is the historical development. As I see it, modern functional analysis originates in the calculus of variation, i.e. the need to solve eigenvalue and stability problems – both very physical. Dieudonné (History of Mathematics 1700-1900) writes:
Around 1880 mathematicians of various areas felt the need for a new analysis with functions of "infinitely many variables". The common idea of functions from one set to another, generalizing Dirichlet's definition of a function began to be melted with the set theoretic interpretation of mathematics, even if the clarity of Dedekind's definition was missed by some. Now if the elements of these sets were functions (in the common sense), curves or surfaces etc. one calls the functions [between those sets] operators, and functionals, if there values are in ##mathbb{R}## or ##mathbb{C}##. A classic example for functionals is the integral ##f mapsto int_a^b p(x)f(x)dx## .Courant and Hilbert (Methods of Mathematical Physics, Vol. I, 1924) do not use the term operator. They speak of functionfunctions (French: fonction de ligne ou fontionnelle) in their chapter "Fundamental Facts of Calculus of Variations".
By functionfunction a quantity or function is understood, which does not depend on a certain number of independent, in certain boundaries deliberate variables, but depend on the course of one or more in certain boundaries deliberate functions, which represent the independent variables. The simplest example is the length of a curve …Then they investigate a couple of examples:
We are faced with the mathematical problem of modelling a phenomena that is probabilistic, but whose probabilistic nature is, in some sense, deterministic. Does this lead to some natural choice of the appropriate mathematical tools?I would say: "yes". As soon as the state of a system (e.g. the wave function) is not determined by finitely many numbers, infinite-dimensional function spaces naturally occur. SInce, unlike ##mathbb{R}^n## or ##mathbb{C}^n##, these function spaces generally have non-equivalent norm topologies, the study of their (functional) analytic properties becomes non-trivial and linear algebra alone no longer suffices.
Can we give a good mathematical answer to the frequently asked question "What is the physical significance of operators?" ? (e.g. https://www.physicsforums.com/threads/what-are-operators.919653/ )
The answers to that question in the physics section say to study more physics. Since we are in the general math section, perhaps we can take a more abstract view. We are faced with the mathematical problem of modelling a phenomena that is probabilistic, but whose probabilistic nature is, in some sense, deterministic. Does this lead to some natural choice of the appropriate mathematical tools?
@UsableThought Thanks, for the trip to English grammar. Yes, the Oxford comma is a discussion on its own. In German the rule is a different one: Commas only in listings without conjunctions like and, or if the conjunction is the start of a complete sentence with subject and predicate. The and substitutes the comma if used as separator only.
@Krylov Thanks for the sources. I added them to the list, although Zeidler was a bit of work to do with his many volumes. On the other hand I found that especially Zeidler is a very valuable source. This way the list got a bit long, but in comparison to the importance of the subject, a recommendable list of textbooks should be a good thing. And if some decided to use the links I integrated to buy a book, then it's even good for us. :wink:
Hello Fresh, thank you for your reply, and you are welcome.
ad 4) I added some sources, but I admit that my library doesn't contain a lot of functional analysis, resp. in the wrong language. E.g. I have a lovely book by Courant and Hilbert (1924), Mathematical Methods of Physics I, but this is probably not a book to recommend nowadays. If you know of a "must read", I would appreciate to add it to the list.I don't know if this would violate one rule or the other, but I personally would not object to foreign language references, as long as there are also references in English. It just so happens that some very good mathematics books are written in German or Russian, and not all of them have been translated.
Speaking about this, a well-known German author whose works have been translated into English is Eberhard Zeidler. His Nonlinear Functional Analysis and its Applications four-part series is no less than encyclopedic, but individual chapters are remarkably readable. His two-part Applied Functional Analysis is a good introduction that contains linear as well as non-linear material.
There is the classical book by Reed and Simon, Functional Analysis. @micromass has its front cover on his shirt.
There are many more personal favorites, but these may be interesting specifically for physics students.
Typo? Should it be "functionals are certain operators" ?
Being a list I thought a repetition of the verb wouldn't be necessary as long as it is still valid from the first part and until a new one is needed.Actually, @fresh_42, you're correct in your understanding of that particular convention for listing. However 1) it is a convention more common to UK and continental English than to U.S. English; and 2) it can become somewhat awkward if noun phrases are involved that require extra parsing by the reader. Also 3) listing of any sort is helped by what copyeditors call the "serial comma," which is a comma used in any list of three or more members; it comes after "and" and before the final member. This helps the reader understand that the last two members of the list aren't joined by that "and" into a separate category, but rather, are both members of the overall list. Thus rather than "X, Y and Z", which subtly implies that Y and Z are somewhat closer to each other than to X, better to write "X, Y, and Z".
So with all that in mind, you could indeed write your list like this –
– and it would just barely skate by as grammatically correct. However, "functionals certain operators" will likely cause many readers to hesitate and re-parse in order to recognize "certain operators" as a complete noun phrase; and even then some may not understand what you mean by "certain" since the word has potentially more than one meaning. Moreover, the last element in the list is a much longer phrase than the first two, which may cause additional hesitation and re-reading. So better in this case to go with @strangerep's suggestion.
Also, to introduce your list, better in this case to use a colon rather than a period in the preceding sentence – a very minor point, but helpful to alert the reader to what's coming; e.g.
I imagine that's more than enough pedantic copyediting for today . . .
[…] I'm not sure how the English grammar deals with these cases […] Heh, I'm not sure either — although English is my first language. :blushing:
To my ear, there's a difference between everyday English, and highfalutin English. :oldbiggrin:
Typo? Should it be "functionals are certain operators" ?A case of lost in translation. Being a list I thought a repetition of the verb wouldn't be necessary as long as it is still valid from the first part and until a new one is needed. However, I'm not sure how the English grammar deals with these cases and I applied mine. I'll add the repetition.
functionals certain operators Typo? Should it be "functionals are certain operators" ?
Thanks @Krylov for the careful reading.
ad 1) Changed phrasing a bit.
ad 2) Well, "codomain" was easy to correct, but the rest was a bit tricky in order to keep it simple and not to go into details. Not sure if it's better now though. It is always a big temptation to me to say more and more about certain subjects, historically as well as technically. All the doors I have knocked on and din't open hide so much mathematical beauty, that it's hard not to enter.
ad 3) Swapped to the next paragraph.
ad 4) I added some sources, but I admit that my library doesn't contain a lot of functional analysis, resp. in the wrong language. E.g. I have a lovely book by Courant and Hilbert (1924), Mathematical Methods of Physics I, but this is probably not a book to recommend nowadays. If you know of a "must read", I would appreciate to add it to the list.
So thank you, once more.
Fresh, thank you for this work, which I believe fits in your more general – and much welcomed – effort to familiarize interested physics students with the mathematics underpinnings of their field.
I feel qualified to comment only on the section titled "Linear and Non-Linear Operators, Functionals and Hilbert spaces". Here are some comments, mostly minor. Quotes from your text are in italic.
1. If we drop the requirement of a dot product, and only want to consider a complete real or complex vector space with a norm, then we call it Banach space. Another important example are Lebesgue spaces, which deal with measurable subsets of ##R^n##.
I find writing another here a bit confusing. People unfamiliar with ##L^p##-spaces might think that Lebesgue spaces are something else than just particular cases of Banach spaces (##1 le p le infty##) or Hilbert spaces (##p = 2##).
2. Now a linear operator ##L## is simply a linear map between vector spaces: ##L:V to W##. The elements of ##V## on which ##L## is defined is the domain of ##L## and its image, i.e. the elements of ##W## which are hit by ##L## is the codomain or range of ##L##.
Since at the end of this section you give examples of bounded as well as unbounded operators (and since these classes of operators require substantially different techniques for their analysis, as you of course know), I would have preferred to write ##L : D(L) subseteq V to W## where ##D(L)## is the domain of ##L##, with ##D(L) = V## in case ##L## is bounded (e.g. the Volterra operator).
In this notation, for me the codomain of ##L## would be ##W## itself, while the range of ##L## would be ##R(L) := LD(L)##.
3. In the non-linear case, operators are (non-linear) functions between normed (in general infinite dimensional) vector spaces (Banach spaces), and (non-linear) functionals are those which map to ##mathbb{R}## or ##mathbb{C}##. Sometimes entire classes of operators are considered, e.g. compact operators, which map bounded sets to those whose closure is compact.
The occurrence of the last line in a paragraph on nonlinear operators unjustly suggests that compact operators are only considered in a nonlinear context.
4. I think if I were to be unfamiliar with functional analysis, this presentation is very brief. The text could benefit from some specific references that you like, preferably per topic of discussion. This way, it really becomes an initiation for the curious student.
Hopefully you find these comments more useful than irritating.