
Frequently Made Errors in Mechanics: Forces
Table of Contents
Entire List for Frequently Made Errors Series
Mechanics
Other
Notation: On this page, a circumflex signifies an average.
1. Forces as vectors
A force is a vector, i.e. has magnitude and direction. But it also has a point of application, which vectors, in general, do not have.
A force can be thought of as a vector pair, one vector specifying its magnitude and direction, the other specifying a point of application.
For a force applied to a rigid body, the precise point of application does not matter; instead, the line of action suffices. This is the straight-line through the point of application, in the direction of the force. The force applied at any point in that line would have the same effect.
2. Tension and Compression
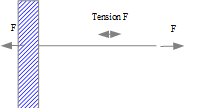
X “If a light string is pulled with a force of F at each end, the tension force in the string is 2F”
Tension is not exactly force; it is more like a pair of opposing forces. Similarly compression.
If you pick a point in a string and consider the portions on either side of that point as separate bodies, the tension at that point is the magnitude of each of the pair of forces, action, and reaction, with which each portion pulls the other.
✓ “If a light string is pulled with a force of F at each end, the tension in the string is F”
Note that this includes e.g. a string pulled with force F at one end and tied to a wall at the other. The wall pulls on the string with force F.
3. Average force
“Work = force × distance, X Therefore average force can be calculated as work done divided by distance”
What is meant by “average force”? Average acceleration is the change in velocity divided by the elapsed time:
##hat {vec a} = Delta vec v/Delta t##
A sensible definition of average force is such that ##hat {vec F} = mhat {vec a}##:
✓##hat {vec F} = mhat {vec a} = mDelta vec v/Delta t = Delta vec p/Delta t##
where ##vec p## is momentum.
If the force happens to be constant then this will produce the same numerical answer as work/distance, but only in that case.
It is possible to define averages in different ways, provided it is made clear. One could specify “force averaged over distance”. But there is another reason for rejecting the work/distance calculation. The completely correct form of Work = force × distance involves vectors:
##Delta E = int vec F.vec{ds}##, ##vec{Delta s} = int vec{ds}##
Turning that into a division results in dividing by a vector, which is not a defined operation:
X ##hat {vec F} = Delta E/vec{Delta s}##
SHM example
“A mass m collides elastically at speed v with a rubber pad of spring constant k. What is the average force bringing the mass to stationary?”
The distance x the pad is compressed is given by
##frac 12 m v^2 = frac 12 k x^2##
##x = vsqrt{frac mk}##
If we calculate the average force from this we get
##hat {vec F_{dist}}=frac 12 vsqrt{mk}##
The time to maximum compression is ##T=frac{pi}2sqrt{frac mk}## . Dividing this into the momentum change mv gives
##hat{vec F} = frac 2{pi}vsqrt{mk}##
4. Available force equations
In two dimensions there are three force equations available. These are usually taken as linear force sums,##Sigma F_x=m a_x##, in (any) two orthogonal directions, plus a moment sum about some reference point; but there are other valid choices:
The two linear equations do not need to be orthogonal; they can be based on any two directions that are not parallel.
One linear equation and moments about two points also works, provided the line through the two points is not orthogonal to the linear choice.
Equations for any other linear direction or moments about any other point can be deduced from the three chosen, so provide no further information
A linear force can be thought of as a moment about a point at infinity (the point being infinitely far away in a direction orthogonal to the linear direction taken).
5. Sign Conventions and Gravity
A common practice is to take ‘up’ as positive. Taking down as positive is fine, but it is advisable to be consistent, using the same convention for displacements, velocities and accelerations. Defining some variables one way and some the other is valid but tends to confuse.
X “If up is positive then the force due to gravity is -mg”
“g” is just a variable name, commonly reserved in mechanics for gravitational acceleration at Earth’s surface. Writing the force as -mg is valid, but in effect adopts an inverted convention for the variable g, i.e. makes g positive downwards. It is more consistent to take the gravitational force as +mg and, when plugging in numbers, provide a negative value for g.
✓ “If up is positive then the force due to gravity is mg, unless g is defined positive down”
That said, it is extremely common to take g positive down but all else positive up.
6. Force and Work
X “The work done by a force on a body is the magnitude of the force multiplied by the distance the body moves.”
That is only true if the force is constant and the distance the body moves is in the same direction as the force.
In general,
✓ Work = ##int vec F. vec{ds}##
If the force is constant, this simplifies to ##vec F.vec{Delta s}##.
If the distance the body moves is entirely in the direction of the constant force, this further simplifies to ##F Delta s##, where ##F## and ##Delta s## are signed scalars.
6.1 Work done by the normal force
X “The normal force does no work”
That is true if the surface is not moving along its perpendicular, but consider a standing person mass m riding up an escalator through a height h. The vertical displacement is h and the normal force is -mg, so the work done is -mgh (g being negative).
Example: Riding an escalator
It gets a little more complicated if the person is also walking up the escalator.
X “If a person is walking up the escalator at a constant speed then the normal force exceeds mg”
If the normal force were to exceed mg then the person must accelerate.
Suppose the step height is s, and in the time the person moves up one step the escalator rises height r. Consider the person as consisting of a point mass m atop an extensible massless leg.
Since the mass is not accelerating, the compression in the leg is |mg|. The escalator rises height r, doing work –mgr. In the same time, the leg extends by length s, doing work –mgs.
6.2 Infinitesimal work
“What is the minimum work needed to move a box weight W on the floor at point A to a point B on the floor distance s away? The floor is level and has a coefficient of kinetic friction ##mu_k##.”
The minimum force needed to drag the box is when it is applied at angle ##tan^{-1}mu_k##,
X so the minimum work done is ##frac{Wsmu_k}{1+{mu_k}^2}##
The minimum work does not necessarily correspond to the minimum force. The work can be lower if a greater force is applied but the force advances a much shorter distance. In the extreme case, a force advancing an infinitesimal distance does infinitesimal work.
In the problem above, a force exceeding W by a tiny amount, acting over a tiny distance, is sufficient to lift the box clear of the floor and hold it clear. A second force acting horizontally over a tiny distance accelerates the box to a tiny speed. No further work, just adequate time, is required to reach point B. In principle, even these small quantities of work might then be recoverable in bringing the box to rest and lowering it to the floor.
✓ The work required to move the box is arbitrarily small
Masters in Mathematics. Interests: climate change & renewable energy; travel; cycling, bushwalking; mathematical puzzles and paradoxes, Azed crosswords, bridge






“Point 3 I have covered in another post under development.
Points 1 and 2 belong in a much more general FME. I’ll add them to my list!”
Correction:
Point 2 I have already covered in an imminent post on Friction.
In my experience,
the errors I listed are much more frequent than any of the ones you listed.
“Here are other common errors…
1) “the magnitude of the normal force is always mg” (because of a formula they saw).
2) “the magnitude of the static friction force is always [itex]mu_k N[/itex]” (because of a formula they saw)
3) “the centripetal force is an additional force drawn on a free-body diagram””
Point 3 I have covered in another post under development.
Points 1 and 2 belong in a much more general FME. I’ll add them to my list!
“Probably the biggest error that students make with vectors is
the incorrect thinking that “vectors add like numbers”…
in particular, that magnitude of a sum of vectors is the sum of their magnitudes.”
Thinking about this some more, it belongs in a separate FME (“Frequently Made Errors”) on vectors. Care to write one? If not, I’ll get to it eventually. Should be able to link to it from the forces paragraph.
“I have to object to the first item. A “line of action” is insufficient to describe a force except in the special case of a rigid body. In full generality, a force is a vector that is attached to a point, which I guess you can call the “point of application”. The point should be thought of as described by some suitable coordinates; not as a “second vector”, which is not really the appropriate way to think about it. The “line of action” is merely the line passing through the point of application such that it is collinear with the force vector.
From here it is easy to generalize to fields of force density, as in continuum mechanics.”
I can certainly add the rigid body rider (as done already in this thread).
A vector to describe the point of application is perfectly reasonable. It would be an appropriate vector for determining the moment about the origin.
Lol, I had the same argument the last two pages :D
“Probably the biggest error that students make with vectors is
the incorrect thinking that “vectors add like numbers”…
in particular, that magnitude of a sum of vectors is the sum of the their magnitudes.”
True. If I can find out how to edit the post now that it has been published (anyone know?) I will add something on that.
“What? I’ve been saying that the whole time. It is my very point that a force can be described with 2 3-dimensional vectors. You seem to want to add another entity to it, or at the very least consider it “a frequently made error” to not consider that line of action.”
Then I misunderstood your objection. It seems all we are arguing about is whether a force has magnitude, direction and point of action, or magnitude, direction and line of action. Line of action is enough to define the force, but you find it less confusing to refer to point of action. I’ll try to reword it a little.
“Probably the biggest error that students make with vectors is
the incorrect thinking that “vectors add like numbers”…
in particular, that magnitude of a sum of vectors is the sum of the their magnitudes.”
True. If I can find out how to edit the post now that it has been published (anyone know?) I will add something on that.
What? I’ve been saying that the whole time. It is my very point that a force can be described with 2 3-dimensional vectors. You seem to want to add another entity to it, or at the very least consider it “a frequently made error” to not consider that line of action.
“the vector+point description uniquely and sufficient describes it”
So you’ve shifted your position to “a force is a vector plus a point of application”?
But either way, I find your “Insight” article to be wrong in the sense that it makes the claim that people are mistaken in not considering the line of action. It is redundant, because the vector+point description uniquely and sufficient describes it. A person using the latter definition is in now way wrong, and in fact is better equipped to use the regular formulas in physics.
Not only that, the term “line of action” produces almost no results on the internet, which means its use will likely be of no help to anybody studying physics.
“The problem is, while it may make some certain sense in mechanics of rigid bodies, once the student moves on to things like Lorentz force, “line of action” makes no sense at all anymore.”
Sure it does. The basic definition is for a point particle, so the line of action is clear. In principle, though, it also applies to a larger rigid body. The Lorentz force on the body as a whole will be the net of the forces on the particles, and it will have a line of action.
The problem is, while it may make some certain sense in mechanics of rigid bodies, once the student moves on to things like Lorentz force, “line of action” makes no sense at all anymore. A student asking “so, what’s the line of action on an electron” will be met with the answer “yeah, forget about that thing here. Force is something different”.
BTW, a line may look like it needs only two values, but it also requires a defined x+y offset to a coordinate system. You actually end up with more that way.
“Maybe this is just my personal Occam’s Razor here, but between a point in space, and a line in space, if the point describes it fully, the point should be preferred.
”
The point requires three coordinates. Since we know the direction, the line of action only requires two.
Is there any problem in the mechanics of rigid bodies where the line of action is inadequate and the point of application needs to be known?
Maybe this is just my personal Occam’s Razor here, but between a point in space, and a line in space, if the point describes it fully, the point should be preferred. For example, what meaning do the infinite other points on that “line of action” have? The line of action extends indefinitely away from the body it applies to; what physical reality does this correspond to?
TLDR, I personally find these additional redundant concepts will wreak more havoc on a student’s understanding than the simple, and minimal, “vector + point in space” definition of a force. Especially when the math in physics nowhere mentions any lines, at all.
“I think this is more than semantics. The boeingconsult site says “a force has magnitude, line of action, direction, and point of application”.
So, that means, it’s
– magnitude and direction => 3-dimensional vector
– line of action => 3-dimensional vector (slope and intercept essentially)
– point of application => 3-dimensional point
A force vector needs 9 scalars to be described? I very much doubt so.”
The boeingconsult statement is clearly excessive. The line of action can be deduced from point of application and direction. The only question is whether to discard line of action or point of application. All the other references I’ve found agree with me that it’s the line of action that matters.
I think this is more than semantics. The boeingconsult site says “a force has magnitude, line of action, direction, and point of application”.
So, that means, it’s
– magnitude and direction => 3-dimensional vector
– line of action => 3-dimensional vector (slope and intercept essentially)
– point of application => 3-dimensional point
A force vector needs 9 scalars to be described? I very much doubt so. In my book, a force is fully described by its 3-dimensional vector of direction, and the 3-dimensional vector of where it is applied.
When I look at things like Lorentz force, I also don’t see the “line of action” anywhere.
“Yes, but that is due to the moment. The force is still just the force, simply acting on a different spot. Don’t conflate what it *does* to a body (whose center of mass might be anywhere) with the clean concept of a force.”
You yourself wrote that a force “has a point of application”. That is, the point of application is an attribute of the force. When you say “clean concept of a force”, you are really referring to the clean concept of a vector. What you call a force, I would call the force vector.
Seems to me we are arguing about semantics. Is a force a disembodied vector, and the application of a force (for want of a better term) the combination of a force and a line of action? Or is a force what we think of in the real world as a force, having attributes of magnitude, direction and line of action?:
[URL]http://en.wikipedia.org/wiki/Statics[/URL] “Force is the action of one body on another.”
[URL]https://books.google.com.au/books?isbn=812190952X[/URL] “A force is completely specified by its Vector and its point of application.”
[URL=”http://www.boeingconsult.com/tafe/structures/struct1/”]www.boeingconsult.com/tafe/structures/struct1/[/URL]forces/forces.htm “a force has magnitude, line of action, direction, and point of application”
If we take the pure vector view, it makes no sense to ask what moment a force has about a point. We must instead ask what moment a particular application of the force has about that point.
Yes, but that is due to the moment. The force is still just the force, simply acting on a different spot. Don’t conflate what it *does* to a body (whose center of mass might be anywhere) with the clean concept of a force.
“Sorry, yeah, I meant moment.
But, please explain this to me. You say “it matters greatly whether its line of action is through the mass centre”. So, you have a force vector, applying on the center of the mass. And then you have *another* vector? What does this additional vector refer to?”
No, I have one force that maybe is not acting through the mass centre. If it is not, it will cause the body to rotate, thereby doing more work on it.
Sorry, yeah, I meant moment.
But, please explain this to me. You say “it matters greatly whether its line of action is through the mass centre”. So, you have a force vector, applying on the center of the mass. And then you have *another* vector? What does this additional vector refer to?
“So, I went to college in Europe, and I can say I have never heard of the concept of “line of action”, nor, after various Google searches, do I understand the point of it. Force has a vector to it that indicates the magnitude and direction, and obviously there is a point that it applies to.
I looked at [URL]http://web.mit.edu/4.441/1_lectures/1_lecture4/1_lecture4.html[/URL] , and it seems to make a mangle of momentum and other things. Momentum is a separate thing, don’t conflate it with force.”
[URL]http://en.wikipedia.org/wiki/Line_of_action[/URL] states:
[INDENT]”The concept is essential, for instance, for understanding the net effect of multiple forces applied to a body.”[/INDENT]
But I would go further. With just one force applied to a body it matters greatly whether its line of action is through the mass centre.
The point of application will obviously tell you the line of action, but of the two it’s the line of action that matters.
I’m not conflating momentum with force. Perhaps you mean moments?
”
I’m unsure how important it is, but I notice that most seem to think of a force as being completely described by its vector. The vector does not tell you the line of action, which as we all know is crucial when it comes to moments. A force really is more like a pair of vectors, but it’s never described that way.
”
So, I went to college in Europe, and I can say I have never heard of the concept of “line of action”, nor, after various Google searches, do I understand the point of it. Force has a vector to it that indicates the magnitude and direction, and obviously there is a point that it applies to.
I looked at [URL]http://web.mit.edu/4.441/1_lectures/1_lecture4/1_lecture4.html[/URL] , and it seems to make a mangle of momentum and other things. Momentum is a separate thing, don’t conflate it with force.
“There are plenty of other common errors. For example the friction force is frequently taken to be μN in situations where that’s actually the maximum force before slipping occurs.”
I have separate one on friction in the works. Just wanted to get some feedback on this simple one first. Others to follow…. moments etc.
“Yeah, number 1, in my opinion, makes it more confusing to say the least. I for one think I have a reasonable understanding of what a force is, but I have no idea what a “line of action” is supposed to be in this context.”
I’m unsure how important it is, but I notice that most seem to think of a force as being completely described by its vector. The vector does not tell you the line of action, which as we all know is crucial when it comes to moments. A force really is more like a pair of vectors, but it’s never described that way.
I’ll expand it, mentioning point of application.
”
In point 2, you could add that a string pulled at both ends (with a force F) is equivalent to a string pulled at one end with a force F and attached to a wall at the other. That seems often to be missed by those who think the tension should be 2F.”
Good idea.
There are plenty of other common errors. For example the friction force is frequently taken to be μN in situations where that’s actually the maximum force before slipping occurs.
Yeah, number 1, in my opinion, makes it more confusing to say the least. I for one think I have a reasonable understanding of what a force is, but I have no idea what a “line of action” is supposed to be in this context.
Thanks a lot, this was really helpful.
Tension is not exactly force; it is more like a pair of opposing forces. Similarly, compression. Yes, force is always tension or compression, at least in Mechanics. Newton’s third law.
No, a force is neither a tension nor a compression. A force is something one body exerts on another. Tension and compression usually refer to extensive states within a body. You could describe an action/reaction pair as a compression or a tension, but not the two individual forces.
Here are other common errors…1) "the magnitude of the normal force is always mg" (because of a formula they saw).2) "the magnitude of the static friction force is always ##\mu_kN##" (because of a formula they saw)3) "the centripetal force is an additional force drawn on a free-body diagram"
I have to object to the first item. A "line of action" is insufficient to describe a force except in the special case of a rigid body. In full generality, a force is a vector that is attached to a point, which I guess you can call the "point of application". The point should be thought of as described by some suitable coordinates; not as a "second vector", which is not really the appropriate way to think about it. The "line of action" is merely the line passing through the point of application such that it is collinear with the force vector.From here it is easy to generalize to fields of force density, as in continuum mechanics.
My favorite insights article so far. I would love to see more articles on common mistakes in other areas of mechanics.
Probably the biggest error that students make with vectors is the incorrect thinking that "vectors add like numbers"… in particular, that magnitude of a sum of vectors is the sum of the their magnitudes.
Point 1, perhaps, needs an illustration. And, maybe, something about two equal and opposite vectors with different lines of action not canceling out to a nett zero force?In point 2, you could add that a string pulled at both ends (with a force F) is equivalent to a string pulled at one end with a force F and attached to a wall at the other. That seems often to be missed by those who think the tension should be 2F.
Great first post haruspex! Nice resource!