
Presenting a Rare Kinematic Formula
Read Time: 3 minutes
Readability: Advanced 📐 (Technical knowledge needed)
Core Topics: rbpointdiskvelocityplane
Here we present some useful kinematic fact which is uncommon for textbooks in mechanics.
Consider a convex rigid body (RB) rolling without slipping on a fixed plane. (The plane can actually be replaced with a some other fixed surface.)
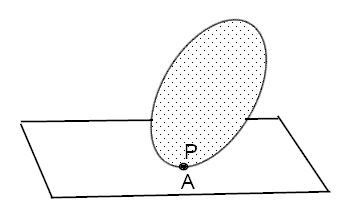
In the picture RB is a filled with dots oval . At a given moment of time RB contacts with the plane by a point ##P##. The point ##P## belongs to RB. So in different moments of time we denote by ##P## the different points of RB. Let ##A## stand for the point of contact, the point ##A## draws a curve on the plane as RB rolls.
Table of Contents
Theorem
##\boldsymbol a_P=-\boldsymbol\omega\times\boldsymbol v_A.##
Here ##\boldsymbol a_P## is the acceleration of the point ##P##; ##\boldsymbol v_A## is the velocity of the point ##A##; ##\boldsymbol\omega## is the angular velocity of RB.
Proof
Introduce a coordinate frame (say ##Oxyz##) which is connected with RB. With respect to this frame we will consider relative and transport velocities and accelerations. By well-known formula we have
$$\boldsymbol v_A=\boldsymbol v_A^e+\boldsymbol v_A^r,$$ where by superscripts ##e,r## we denote transport velocity and relative velocity respectively. Since RB does not slip it follows that ##\boldsymbol v_A^e =0## and thus
$$\boldsymbol v_A=\boldsymbol v_A^r.\qquad (**)$$
Differentiate the last equality in time
$$\boldsymbol a_A=\frac{\delta}{\delta t}\boldsymbol v_A^r+\boldsymbol \omega\times \boldsymbol v_A^r=\boldsymbol a_A^r+\boldsymbol \omega\times \boldsymbol v_A^r,\qquad (*)$$
here ##\frac{\delta}{\delta t}## stands for derivative relatively the frame ##Oxyz##. On the other hand there is standard formula
$$\boldsymbol a_A=\boldsymbol a_A^r+\boldsymbol a_A^e+2\boldsymbol \omega\times \boldsymbol v_A^r.$$
Observe that ##\boldsymbol a_A^e=\boldsymbol a_P## and by formula (**) we obtain
$$\boldsymbol a_A=\boldsymbol a_A^r+\boldsymbol a_P+2\boldsymbol \omega\times \boldsymbol v_A.$$
Combining the last formula with (*) we get the assertion of the theorem.
As an example of application of this theorem we just quote the following classical problem.
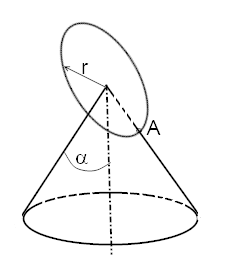
Consider a fixed cone with angle ##\alpha##. A disk rolls around the cone without slipping such that the center of the disk coincides with cone’s apex all the time. The disk’s rim touches the cone in a point ##A##. The point ##A## belongs to the disk. The radius of the disk equals ##r##.
Let ##a_A## be a given acceleration of the point ##A## at a moment ##t=t_0##. Find an angular velocity of the disk at the moment ##t_0##.
PhD – Interested in differential equations and classical mechanics






Thanks for the post! This is an automated courtesy bump. Sorry you aren't generating responses at the moment. Do you have any further information, come to any new conclusions or is it possible to reword the post?