How to Transit a Rotating Tunnel: Physics & Trajectories
Table of Contents
Introduction
Preface
While browsing through unanswered posts in the Classical Physics Workshop, I came across a gem at the link shown below. For the reader’s convenience, I have included (in italics) the OP’s statement of the question.
Original problem
https://www.physicsforums.com/threads/spacecraft-path-with-polar-coordinates.683210/
There is a circular gate rotating at a constant angular speed of ##\omega##. The circular gate has a tunnel across its diameter. The mission is to pass through the gate. (That is, come in one side of the gate, travel the whole diameter, and exit at the other side.)
Also, craft is neutrally buoyant, the craft has four thrusters (in the i, -i, j, and -j directions), and sudden movements cause ‘slosh’ in the fuel tank that destroys the craft.
I gave a brief response at the time to remove the post from the unanswered group, but the physics behind the question gnawed at me to the point that I felt I had to provide as complete an answer as I could imagine. I hope the reader will enjoy reading it as much as I enjoyed putting it together.
Assumptions
Before proceeding with the solution, additional underlying assumptions and considerations need to be listed.
- The tunnel is unidirectional; there are only one entrance and one exit.
- The tunnel rotates about an axis perpendicular to its length passing through the tunnel’s midpoint.
- The craft moves in the xy-plane which is coincident with the plane of rotation of the tunnel; the z-axis is the axis of rotation and the origin of coordinates is at the midpoint of the tunnel.
- Before entry, the craft is in the region ##x > 0##; the y-axis forms a boundary that cannot be crossed except through the tunnel; the craft must exit in the “other” side, the ##x < 0## region.
- The craft enters the tunnel right-to-left with its front-to-rear axis aligned with the ##x##-axis; the front of the craft points in the negative ##x##-direction.
- The craft does not spin about its center of mass and maintains the same orientation relative to the fixed stars while the tunnel rotates around it. In other words, the Cartesian coordinates fixed on the non-inertial frame of the craft are (and remain) parallel to the Cartesian coordinates of the inertial frame. This means that: when ##a_x## is positive (negative), the front (rear) thruster is firing; when ##a_y## is positive (negative), the left (right) thruster is firing.
- The thrusters are programmable, in the sense that one can program them with expressions in which time is an independent variable. Finding these expressions answers the question.
Theory & Approach
Governing Equations
The acceleration ##\vec{a}_r## in a frame rotating with constant angular velocity ##\vec{\omega}## is related to the acceleration ##\vec{a}_i## in an inertial frame by (https://en.wikipedia.org/wiki/Rotating_reference_frame)
$$\vec{a}_r = \vec{a}_i – 2\vec{\omega} \times \vec{v}_r – \vec{\omega} \times (\vec{\omega} \times \vec{r})$$
Here ##\vec{v}_r## is the velocity of the craft in the rotating frame. In the rotating frame, we want the craft to enter the tunnel and travel in a straight line at constant velocity which requires that ##\vec{a}_r = 0##. In that case,
$$\vec{a}_i = 2\vec{\omega} \times \vec{v}_r + \vec{\omega} \times (\vec{\omega} \times \vec{r}) \qquad (1)$$
Velocity Transformation
Now the velocity in the rotating frame is related to the velocity ##\vec{v}_i## in the inertial frame by
$$\vec{v}_r = \vec{v}_i – \vec{\omega} \times \vec{r} \qquad (2)$$
To test equation (1), we note that a special case is uniform circular motion where ##\vec{v}_i = \vec{\omega} \times \vec{r}##. Upon substitution of equation (2) in (1), we find that the thrusters need to provide acceleration
$$\vec{a}_i = 2\vec{\omega} \times (\vec{\omega} \times \vec{r}) – \vec{\omega} \times (\vec{\omega} \times \vec{r}) = \vec{\omega} \times (\vec{\omega} \times \vec{r}) = -\omega^2 \vec{r}$$
as expected. We can now solve the problem in the inertial frame where the net external force, which provides the acceleration ##\vec{a}_i##, is the thruster force. The Cartesian components of this acceleration in the inertial frame are
$$\ddot{x} = -2\omega \dot{y} + \omega^2 x \qquad (3)$$
$$\ddot{y} = 2\omega \dot{x} + \omega^2 y \qquad (4)$$
Complex-Variable Solution
First we define two auxiliary complex parameters
$$\eta = x + iy; \quad \xi = x – iy$$
Then we find that
$$x = \frac{1}{2}(\eta + \xi); \quad y = \frac{1}{2i}(\eta – \xi)$$
Upon substitution and rearrangement, equations (3) and (4) become
$$(\ddot{\eta} + \ddot{\xi}) – 2i\omega(\dot{\eta} – \dot{\xi}) + \omega^2(\eta + \xi) = 0$$
$$(\ddot{\eta} – \ddot{\xi}) – 2i\omega(\dot{\eta} + \dot{\xi}) + \omega^2(\eta – \xi) = 0$$
We decouple the equations by adding to get
$$\ddot{\eta} – 2i\omega\dot{\eta} + \omega^2\eta = 0$$
The most general solution of this ODE is
$$\eta(t) = A\,e^{i\omega t} + B\,t\,e^{i\omega t}$$
By definition, ##\eta## and ##\xi## are complex conjugates of each other. Then
$$\eta + \xi = \eta + \eta^* = 2\,\mathrm{Re}[\eta] = 2x \;\rightarrow\; x = \mathrm{Re}[\eta]$$
$$\eta – \xi = \eta – \eta^* = 2i\,\mathrm{Im}[\eta] = 2iy \;\rightarrow\; y = \mathrm{Im}[\eta]$$
Therefore we need only work with ##\eta## and separate its real and imaginary parts to obtain the Cartesian components. We note that in expressions such as ##\eta(t) = [a(t) + ib(t)]\,e^{i\omega t}## (a, b real) we can write the vector in polar coordinates as ##\eta(t) = a(t)\,\hat{r} + b(t)\,\hat{\phi}##.
Applying the Initial Conditions
Initial and Exit Positions
We take the initial position of the craft at the moment of entry (##t = 0##) to be
$$\eta(0) = R\,e^{i\phi_0}$$
where ##R## is the radius of the tunnel. Then
$$\eta(t) = R\,e^{i(\omega t + \phi_0)} + B\,t\,e^{i\omega t}$$
The positions of entry point A and exit point B are given respectively by
$$r_A(t) = R\,e^{i(\omega t + \phi_0)}; \quad r_B(t) = -R\,e^{i(\omega t + \phi_0)}$$
Normally, the second arbitrary constant in the solution of a second order ODE is obtained by evaluating the first derivative of the solution at ##t = 0##. Here, we must ensure that the craft exits in the allowed region ##x < 0##. Therefore, it seems more appropriate to pick the position of the exit at exit time ##t = t_e## as the second “initial” condition and let the initial velocity be what it must be. Then
$$\eta(t_e) = R\,e^{i(\omega t_e + \phi_0)} + B\,t_e\,e^{i\omega t_e} = -R\,e^{i(\omega t_e + \phi_0)} \;\rightarrow\; B = -\frac{2R\,e^{i\phi_0}}{t_e}$$
which gives
$$\eta(t) = R\!\left(1 – \frac{2t}{t_e}\right)e^{i(\omega t + \phi_0)}$$
Dimensionless Time and Transit Parameter
We now define: (a) dimensionless parameter ##\tau \equiv t/T## which denotes time in units of the period ##T## and (b) the exit time as a fraction/multiple of the period, ##t_e \equiv \kappa T##. Then the position is given by
$$\eta(\tau) = R\!\left(1 – \frac{2\tau}{\kappa}\right)e^{i(2\pi\tau + \phi_0)}$$
We get the velocity and acceleration by taking the appropriate derivatives,
$$\beta(\tau) = \frac{1}{T}\frac{d\eta}{d\tau} = \omega R\!\left[-\frac{1}{\pi\kappa} + i\!\left(1 – \frac{2\tau}{\kappa}\right)\right]e^{i(2\pi\tau + \phi_0)}$$
$$\alpha(\tau) = \frac{1}{T}\frac{d\beta}{d\tau} = -\omega^2 R\!\left[\left(1 – \frac{2\tau}{\kappa}\right) + \frac{2i}{\pi\kappa}\right]e^{i(2\pi\tau + \phi_0)}$$
Moving Through the Tunnel
Polar Expressions
The expressions become more transparent if cast as vectors in polar coordinates
$$\vec{r}(\tau) = R\!\left(1 – \frac{2\tau}{\kappa}\right)\hat{r}$$
$$\vec{v}(\tau) = \omega R\!\left[-\frac{1}{\pi\kappa}\,\hat{r} + \left(1 – \frac{2\tau}{\kappa}\right)\hat{\phi}\right]$$
$$\vec{a}(\tau) = -\omega^2 R\!\left[\left(1 – \frac{2\tau}{\kappa}\right)\hat{r} + \frac{2}{\pi\kappa}\,\hat{\phi}\right]$$
Specifically, the velocity at the time of entry ##\tau = 0## is
$$\vec{v}(0) = -\frac{\omega R}{\pi\kappa}\,\hat{r} + \omega R\,\hat{\phi}.$$
This makes sense. At the time of entry, the craft’s tangential component is ##\omega R## and matches the tunnel’s tangential velocity (the craft must not bump into the tunnel wall) while the radial component moves the craft into and through the tunnel.
It is reassuring to show that the speed of the craft in the rotating frame is constant while the craft is in the tunnel. In the velocity transformation equation (2), we express the cross product in complex form
$$\vec{\omega} \times \vec{r} \;\rightarrow\; i\,\omega\,\eta$$
Then the velocity in the rotating frame is
$$\beta_r = \beta_i – i\,\omega\,\eta = \frac{\omega R}{\pi\kappa}\,e^{i(2\pi\tau + \phi_0)}$$
where we have used ##\beta(\tau)## found earlier for ##\beta_i##. Reminder: Here, subscript “r” stands for “rotating” not “radial”. The time dependence arises because the velocity in the rotating frame is in terms of unit vectors fixed in the non-rotating inertial frame. Nevertheless, the speed is constant as expected and given by
$$|\vec{v}_r| = \frac{\omega R}{\pi\kappa}.$$
This last expression can be understood as follows: In the rotating frame, in time ##t_e = \kappa T## the craft has traveled distance ##2R## at constant speed ##u##. Then
$$u = \frac{2R}{\kappa T} = \frac{2R\omega}{2\pi\kappa} = \frac{\omega R}{\pi\kappa}$$
Cartesian Components
The Cartesian components of the acceleration are necessary for programming the thrusters. We obtain them by separating real and imaginary parts of the first set of three equations,
$$x(\tau) = R\!\left(1 – \frac{2\tau}{\kappa}\right)\cos(2\pi\tau + \phi_0); \quad y(\tau) = R\!\left(1 – \frac{2\tau}{\kappa}\right)\sin(2\pi\tau + \phi_0).$$
$$v_x(\tau) = \omega R\!\left[-\left(1 – \frac{2\tau}{\kappa}\right)\sin(2\pi\tau + \phi_0) – \frac{1}{\pi\kappa}\cos(2\pi\tau + \phi_0)\right];$$
$$v_y(\tau) = \omega R\!\left[\left(1 – \frac{2\tau}{\kappa}\right)\cos(2\pi\tau + \phi_0) – \frac{1}{\pi\kappa}\sin(2\pi\tau + \phi_0)\right].$$
$$a_x(\tau) = -\omega^2 R\!\left[\left(1 – \frac{2\tau}{\pi\kappa}\right)\cos(2\pi\tau + \phi_0) – \frac{2}{\pi\kappa}\sin(2\pi\tau + \phi_0)\right];$$
$$a_y(\tau) = -\omega^2 R\!\left[\left(1 – \frac{2\tau}{\kappa}\right)\sin(2\pi\tau + \phi_0) + \frac{2}{\pi\kappa}\cos(2\pi\tau + \phi_0)\right].$$
Acceleration Constraints
The “no sloshing” stipulation implies that the velocity must change relatively slowly, i.e. that the magnitude of the acceleration cannot exceed a certain threshold value. This magnitude is given by
$$|\vec{a}(\tau)| = \sqrt{\alpha^*(\tau)\,\alpha(\tau)} = \omega^2 R\!\left[\left(1 – \frac{2\tau}{\kappa}\right)^2 + \frac{4}{\pi^2\kappa^2}\right]^{1/2}$$
The expression is symmetric about ##\tau = \kappa/2##, the time when the craft crosses the origin, where it has a minimum. Its maximum value occurs at the times of entry and exit and is
$$a_{\max} = \omega^2 R\!\left[1 + \frac{4}{\pi^2\kappa^2}\right]^{1/2}$$
The expression indicates that the longer the transit time ##\kappa## the less acceleration is required. Now in the non-inertial frame attached to the craft this acceleration manifests itself to the craft’s contents as an effective acceleration of gravity. We quantify the “no sloshing” constraint and propose that the contents of the craft cannot tolerate an effective gravity greater than a threshold value ##g_0##. The question then is, given this quantifiable constraint, what is the smallest value of ##\kappa## that will allow a comfortable transit? We have
$$\omega^2 R\!\left[1 + \frac{4}{\pi^2\kappa^2}\right]^{1/2} \leq g_0 \;\rightarrow\; \gamma \geq \left[1 + \frac{4}{\pi^2\kappa^2}\right]^{1/2} \quad \left(\gamma \equiv \frac{g_0}{\omega^2 R}\right)$$
At the shortest transit time ##\kappa_{\min}## we have an equality. The resulting equation is solved to give
$$\kappa_{\min} = \frac{2}{\pi\sqrt{\gamma^2 – 1}} \qquad (5)$$
When ##\gamma < 1##, which implies that ##g_0 < \omega^2 R##, there can be no transit because the craft must match the centripetal acceleration ##\omega^2 R## at the points of entry and exit. Clearly, the higher the value of ##\gamma## for a given craft-tunnel pair, the shorter the minimum transit time. When ##\gamma > 1.62##, ##\kappa_{\min} < 0.5## which means that the craft can make the transit before the exit point rotates out of the ##x < 0## region.
Shortest Transit Time
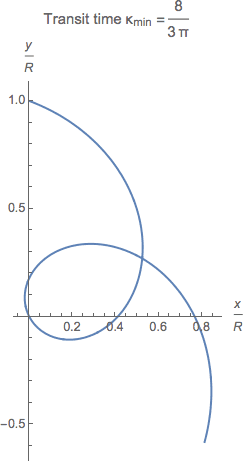
To illustrate with a concrete example how all this might work, let us assume a craft-tunnel combination such that ##\gamma = 5/4##. This value is sufficiently low to require a trajectory in the inertial frame that loops back on itself which makes it more interesting. We use equation (5) to find ##\kappa_{\min} = \frac{8}{3\pi} = 0.85##. This is more than half a period and less than a full period which implies that, regardless of the value of ##\phi_0##, the craft cannot just zip through the tunnel before the exit point crosses over into the “forbidden” ##x > 0## region. Thus, the value of ##\phi_0## must be such that the exit point B has traversed the entire forbidden region and is back in the allowed ##x < 0## region at time ##\tau = \kappa## when the craft exits.
The acceptable range of values for ##\phi_0## that will permit a valid trajectory is bracketed by two limits: the craft must (a) enter just to the right of the positive ##y##-axis or (b) exit just to the left of the positive ##y##-axis. Finding the first limit is easy; if ##\phi_0 = \pi/2##, the exit point, initially at ##3\pi/2##, will clearly be in the region ##x < 0## when its angular displacement is between half and a full revolution. For the second limit, we note that the angular position of the exit is given by ##\phi_B(\tau) = 2\pi\tau + \pi + \phi_0##. We require that at exit time ##\tau = \kappa## this be ##2\pi + \pi/2##.
$$2\pi\kappa + \pi + \phi_0 = 2\pi + \tfrac{\pi}{2} \;\rightarrow\; \phi_0 = \frac{3\pi}{2} – \pi\kappa$$
With ##\kappa = \frac{8}{3\pi}##, the range of entry angles is ##-36^\circ < \phi_0 < 90^\circ##. The parametric plot below shows the shortest time trajectory for ##\gamma = 5/4## and ##\phi_0 = -36^\circ##. The craft moves along the curve from lower right to the upper left. For other choices of ##\phi_0## values in the allowed range, as ##\phi_0## increases the trajectory will rotate about the origin until the entry point on the lower right reaches the positive ##y##-axis.
The components of the acceleration for the trajectory shown above are plotted below.
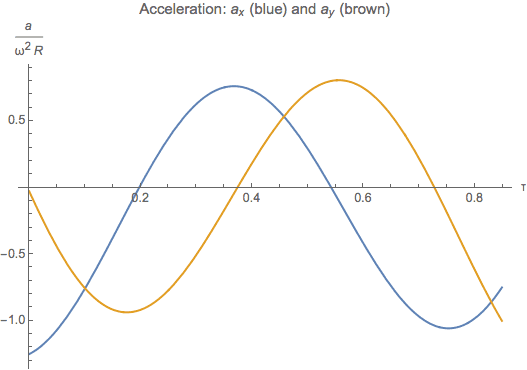
These components are smooth, continuous functions which means that the condition “no sloshing” is satisfied during the time interval ##0 < \tau < \kappa##.
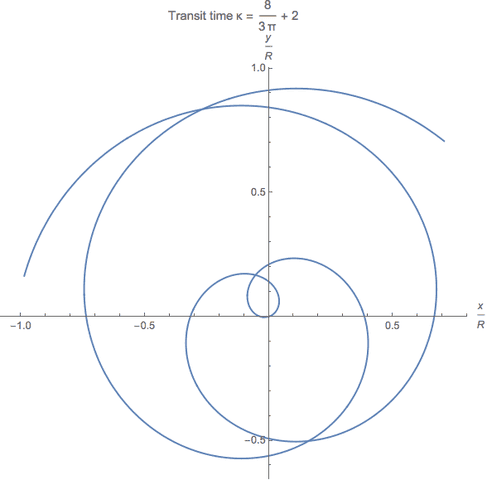
Additional Trajectories
There is a multitude of solutions if we relax the shortest transit time requirement. For example, we may fix the entry angle ##\phi_0## and increase the transit time until the exit point touches the negative ##y##-axis. Furthermore, to all of the solutions obtained this way, we may add any number of integers to the value of ##\kappa##. The “scenic” trajectory shown below is an extension of the one shown above with new parameters ##\phi_0 = \pi/4## and ##\kappa = \frac{8}{3\pi} + 2##.
Exiting the Tunnel
Deflection Angle
The overall change in direction of the craft can be determined from the cosine of the angle ##\delta## between the directions of travel at the entry and exit points.
$$\cos(\delta) = \frac{\vec{v}(0)\cdot\vec{v}(\kappa)}{|\vec{v}(0)|\,|\vec{v}(\kappa)|} = \frac{(1 – \pi^2\kappa^2)\cos(2\pi\kappa) – 2\pi\kappa\sin(2\pi\kappa)}{1 + \pi^2\kappa^2}$$
The right hand side is of the form ##A\sin(\theta) + B\cos(\theta)## and can be cast in the equivalent form ##C\cos(\theta + \phi)## if we identify
$$C = \sqrt{A^2 + B^2}; \quad \phi = \arctan\!\left(-\frac{A}{B}\right).$$
Here,
$$\theta = 2\pi\kappa; \quad A = -\frac{2\pi\kappa}{1 + \pi^2\kappa^2}; \quad B = \frac{1 – \pi^2\kappa^2}{1 + \pi^2\kappa^2}; \quad C = 1.$$
which results in
$$\cos(\delta) = \cos\!\left[2\pi\kappa + \arctan\!\left(\frac{2\pi\kappa}{1 – \pi^2\kappa^2}\right)\right]$$
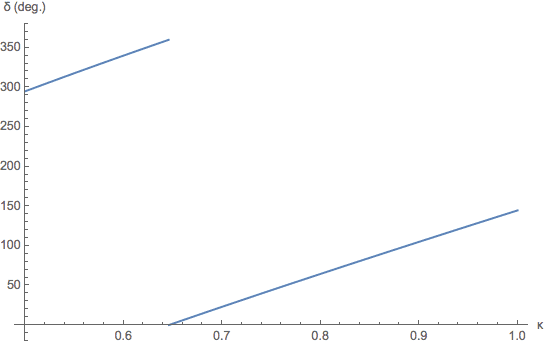
We observe that (a) transit time parameter ##\kappa## can take multiple values, depending on the selected number of tunnel revolutions before the craft exits, and (b) when the craft crosses the origin inside the tunnel, its phase jumps by ##\pi##. To account for these observations, we write the deflection angle as
$$\delta(\kappa) = \mathrm{mod}\!\left\{\left[2\pi\kappa + \arctan\!\left(\frac{2\pi\kappa}{1 – \pi^2\kappa^2}\right) – \pi\right],\, 2\pi\right\}.$$
If we assume that the craft enters at ##\phi_0 = \pi/2##, the valid transits are in the interval ##0.5 < \kappa < 1## and we can generate the plot shown below for that range. The arctangent term is approximately linear and considerably smaller than ##2\pi\kappa## in the specified range which explains the seeming linearity in the plot.
Epilogue
The question yet to be answered is, how did the craft get to the entry point in the first place? That is, assuming that it started from rest relative to the axis of rotation at some distance from it, what path could it have followed given the acceleration constraints and the required velocity and acceleration at the point of entry? The prequel is beyond the scope of this post.
I am a retired university physics professor. I have done research in biological physics, mostly studying the magnetic and electronic properties at the active sites of biomolecules and their model complexes. I have also dabbled in Physics Education research.






This reminds me of the wormholes in many sci-fi tv shows and movies where you clearly don’t want to bump into the wormhole walls. Maybe some director will spot your solution and factor it into some movie. One can only hope and once can only hope to get some recognition and/or money for its use there. :-)
As an application, I was thinking more along the lines of a shooting video game in which you can reach your opponent only by going through the tunnel and you aim by controlling the frequency of rotation. Of course it will be possible to shoot yourself if you are careless.