First-Order Linear Equation: Definition & Solutions
Table of Contents
Definition / Summary
This article summarizes the first-order (linear) polynomial equation in one variable, its solution, and natural extensions to matrices and operators.
Definition
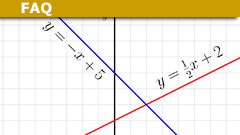
A first-order polynomial (linear) equation in one variable has the general form [tex]Mx + B = 0[/tex], where [tex]x[/tex] is the variable, [tex]M[/tex] and [tex]B[/tex] are constants, and [tex]M \neq 0[/tex].
Equation (standard form)
[tex]Mx + B = 0[/tex]
Scalar solution
Because [tex]M \neq 0[/tex], the solution in the scalar (ordinary number) case is
[tex]x = -\dfrac{B}{M}.[/tex]
Matrix and vector case
The variable x does not have to be a scalar number. If x and B are vectors and M is a matrix, a solution exists when the matrix is invertible. The condition for a solution to exist is
[tex]\det(M) \neq 0.[/tex]
When that holds, the solution is
[tex]\vec{x} = -\,M^{-1}\vec{B},[/tex]
where [tex]M^{-1}[/tex] is the matrix inverse of M.
Operator example: Green’s function for the Schrödinger equation
A more abstract example uses linear operators. Consider the Green’s function equation for the time-dependent Schrödinger equation. In that case, x is a Green’s function, B is a Dirac delta function in time, and the operator M takes the form
[tex]M = \left(\frac{i}{\hbar}\frac{\partial}{\partial t} – \hat{H}\right),[/tex]
where [tex]\hat{H}[/tex] is the Hamiltonian operator.
Further reading
Comment thread (original discussion)
This article was authored by several Physics Forums members with PhDs in physics or mathematics.








Leave a Reply
Want to join the discussion?Feel free to contribute!