Quaternions in Projectile Motion
Table of Contents
Introduction
In a previous Physics Forums article entitled “How to Master Projectile Motion Without Quadratics”, PF user @kuruman brought to our attention the vector equation ##\frac{|V_0 \times V_f|}{g} = R## and lamented the fact that:
“Equally unused, untaught and apparently not even assigned as a “show that” exercise is Equation (4) that identifies the range as the magnitude of the cross product of the initial and final velocity divided by g.”
In this article, we reproduce and make use of equations presented in a 60s vintage article from the American Journal of Physics entitled “Convenient Equations for Projectile Motion”. The article abstract indicates:
“Quaternion multiplication of the basic vector equations for uniformly accelerated motion gives 2 equations: ##v^2 = u^2 + 2\vec{a}.\vec{s}## and ##\vec{a} \times \vec{s} = \vec{v} \times \vec{u}## which provide a solution for some projectile problems.”
It will be noted that the first equation is essentially an expression for the conservation of mechanical energy whilst the second is exactly that referred to by PF user @kuruman above. Whilst – with the studied understatement typical of 60s vintage AJP articles such as this one – we are told that the equations “provide a solution for some projectile problems”, we intend to demonstrate that virtually every single projectile motion problem we have found (in the annals of Physics Forums homework questions and elsewhere) can be solved using these two equations in tandem. Echoing the comment of PF user Kuruman, J. Gibson Winans – author of the quaternions article – writes:
“Equation (7) (ie ##\vec{a} \times \vec{s} = \vec{v} \times \vec{u}##) is one which seems to have had little use in describing projectile motion.”
We hope to further demonstrate that PF user @kuruman‘s lament is entirely justified and that J. Gibson Winan’s statement above is just one step too far in modesty even given the AJP penchant for ‘studied understatement’!
Quaternion Derivation
We begin with a disclaimer: the current author has no prior experience with quaternions other than that researched for this article so the derivation which follows is quoted ‘verbatim’ from the article by J. Gibson Winans. He begins by presenting the problem of a projectile fired at one elevation being required to hit a target at a different elevation:
“To solve this problem conveniently, it suffices to treat the basic equations of accelerated motion as vector equations and derive additional equations from them. Writing
##\begin {align}\vec{a}=\frac{\vec{v}-\vec{u}}{t}\text{ as }\vec{a}t=\vec{v}-\vec{u} \end {align}##
and
##\begin {align}\frac{\vec{s}}{t} = \frac{(\vec{v}+\vec{u})}{2} \text{ as }\frac{2\vec{s}}{t} = \vec{v}+\vec{u}\end {align}##
gives the two basic vector equations in a convenient form. Elimination of v between (1) and (2) gives the much-used vector equation:
##\begin {align}\vec{s} = \vec{u}t + ½\vec{a}t^2.\end {align}##
To obtain two additional equations to assist in the solution of this problem, Eq. (2) can be multiplied by Eq. (1) to obtain
##\begin {align}2\vec{a}\vec{s}=v^2-\vec{u}\vec{v}+\vec{v}\vec{u}-u^2\end {align}##
Author’s note: Variable t is eliminated when the above product is obtained. However, it can easily be retrieved either from Eqn 1 or Eqn 2 if required.
“Equation (4) contains three products of vectors. These are neither scalar products nor vector products, but are quaternion products. The quaternion product of two vectors is the scalar product plus the vector product. Equation (4) therefore is equivalent, after cancelling , to
##\begin {align}\vec{a}.2\vec{s} + \vec{a} \times 2\vec{s} = v^2 + \vec{v}.\vec{u} +\vec{v} \times \vec{u} – \vec{u}.\vec{v}– \vec{u} \times \vec{v} – u^2. \end {align}##
Equation (5) can be separated into two equations, one a scalar equation and one a vector
##\begin {align}\vec{a}.2\vec{s} = v^2 – u^2.\end {align}##
Since ##– \vec{u} \times \vec{v}=\vec{v} \times \vec{u},## and the factor 2 cancels on both sides of equation , the vector equation is:
##\begin {align}\vec{a} \times 2\vec{s} = 2\vec{v} \times \vec{u}\implies\vec{a} \times \vec{s} = \vec{v} \times \vec{u}.\end {align}##
Equations (1) to (7) above are reproduced in full from American Journal of Physics 29, 623 (1961); https://doi.org/10.1119/1.1937861 with the kind permission of the American Association of Physics Teachers.
In the case of projectile motion, Equation 6 takes the well-known form ##v^2-u^2=-2g\Delta h## whilst equation 7 can be written as ##\vec{g} \times \vec{R} = \vec{v} \times \vec{u}## where R is the horizontal range of the projectile.
We will illustrate the technique of using these 2 equations in tandem by providing 2 worked examples: one numeric and one symbolic. There are many other examples one could choose from but, for the sake of brevity, we just provide a couple of ‘aperitifs’. We invite our readers to try out the technique on any selected 2D projectile problem and share their experience in the comments section.
Alternate Derivations
We do not have to use quaternions to derive either the dot product or cross-product equations. We have already mentioned (for example) that the dot product equation reflects the conservation of mechanical energy:
$$ ½mv^2 = ½mu^2 +\vec{ F}.\vec{s}\implies ½mv^2 = ½mu^2 + m\vec{a}.\vec{s} \implies v^2-u^2=2\vec{a}.\vec{s}.$$ In the case of projectile motion (as mentioned previously), this expression simplifies to the familiar ##v^2-u^2=-2g\Delta h## where ##\Delta h## is the change in height of the projectile relative to its starting point. g is taken as a positive constant so the negative on the right-hand side arises from ##\vec g = -g \hat j##, where ##\hat j## is a unit vector pointing upwards.
Exploiting the fact that in projectile motion the acceleration vector only has a ##\hat j## component, we can also employ the following Calculus derivation adapted from that in a related insights article.
$$-g=\frac{dv_y}{dt}=\frac{dv_y}{dh}\frac{dh}{dt}=v_y\frac{dv_y}{dh}\implies v_y dv_y=-g dh$$
$$\int_{u_y}^{v_y}v_y dv_y=-g\int_{h_0}^h dh \implies {v_y}^2-{u_y}^2=-2g(h-h_0)=-2g\Delta h,$$ where ##\Delta h## is the change in vertical height of the projectile and will be negative if the projectile lands at a point lower than its launch point. Note that since ##{v_x}^2={u_x}^2##, we can also write this as: $${v_y}^2+{v_x}^2-({u_y}^2+{u_x}^2)=-2g \Delta h \implies v^2-u^2=-2g\Delta h$$
PF user @kuruman points out that the cross-product part of the quaternion equation can be derived as follows:
$$\vec{a}\times\vec{s}=\vec{a} \times (\vec{u} t+\frac{1}{2} \vec{a} t^2)=(\vec{a}t )\times \vec {u} =(\vec{v}-\vec{u})\times \vec{u} =\vec{v}\times\vec{u}.$$
Or, if (in vector form) we write ##\vec{v}=\vec{u} + \vec{a}t##, we can obtain an expression for the vector cross product: $$\vec{v} \times \vec{u}=(\vec{u} + \vec{a}t) \times \vec{u}=\vec{a} \times \vec{u}t. $$ In the case of projectile motion ##\vec{a}=(0,-g)## and ##\vec{u}t=(u_xt,u_yt).##When we obtain the vector cross product ##\vec{a} \times \vec{u}t##, it is independent of u_y. Hence we can write: $$\vec{v} \times \vec{u}=\vec{g} \times \vec{R} $$ where ##\vec{R}=u_xt\;\hat{i}## is the horizontal range of the projectile expressed as a vector.
A question arising from the cross-product derivations above relates to how we should interpret the physics of the vector cross-product itself. For example ##\vec{g}\times\vec{R}## is theoretically a vector at right angles to both ##\vec{g}## and ##\vec{R}## and has units of velocity squared. What could that mean physically?
PF User @TSny provides us with the following suggestion:
“One interpretation of ##\vec{R}\times\vec{g}## is the torque per unit mass acting on the particle relative to the launch point. Thus, ##\vec{R}\times\vec{g}## should equal the rate of change of the angular momentum per unit mass.
The definition of the angular momentum per unit mass is ##\vec L = \vec s \times \vec v##. Here, we must use the full position vector ##\vec s## rather than ##\vec R##. However, for the time derivative, we get
##\dot {\vec L} = \dot {\vec s} \times \vec v + \vec s \times \dot {\vec v} = \vec v \times \vec v +\vec s \times \vec g = \vec s \times \vec g = \vec R \times \vec g##.
So, ##\dot{\vec L}## can be written in terms of ##\vec R## instead of ##\vec s##.
Worked Example 1
The numeric problem to be solved is to obtain the horizontal range and hence the time of flight for a rock hurled from a volcano at an angle of ##35^{\circ}## to the horizontal at a velocity of 25m/s landing at a point 20m below its starting point. We will make use of the vector facilities available from Wolfram Alpha. Note that Equation 7 will be submitted in vector form whilst Equation 6 is first employed to determine ##v_y##. R (horizontal range) is the variable being sought and – once obtained – can simply be divided by ##v_{x}=25\cos(35^{\circ})## to obtain time of flight.
Concerning the Wolfram Alpha entry below, the input data is as follows:
$$\vec{g}=(0,-9.8)$$ $$\vec{R}=(R,0)$$ $$\vec{u}=(25cos(35^{\circ}),25sin(35^{\circ}))$$
The horizontal component of velocity ##u_x=v_x=25cos(35^{\circ})## does not change but we will employ Equation 6 to calculate ##v_y##: $$v_y=\sqrt{(25sin(35))^2+2\times9.8\times20)}.$$ Hence the overall vector entry for ##\vec{v}## will be: $$\vec{v}=\left(25cos(35^{\circ}),-\sqrt{(25sin(35))^2+2\times9.8\times20)}\right)$$
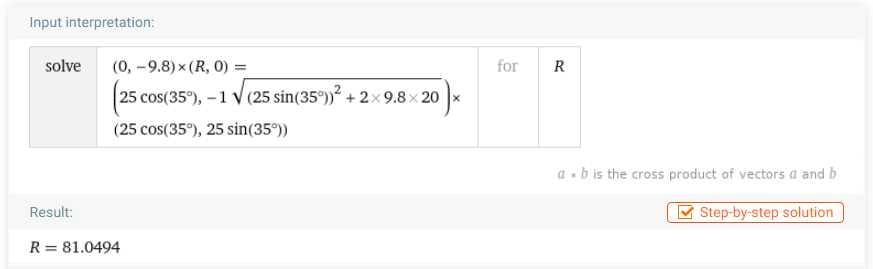
Dividing by ##v_x=25\cos(35^{\circ})## we obtain ##t=3.958\;s.## for the time of flight. The reader will find a ‘conventional’ solution to the same problem here. (you might have to scroll down somewhat.)
Worked Example 2: Range up a Slope
This will be a symbolic problem whereby we derive an equation for the range w of a projectile fired up a slope of angle ##\alpha## at a velocity v and angle ##\theta## from the horizontal (clearly ##\theta>\alpha##). Preparing our entries for submitting and solving the vector equation on Wolfram Alpha, we write:
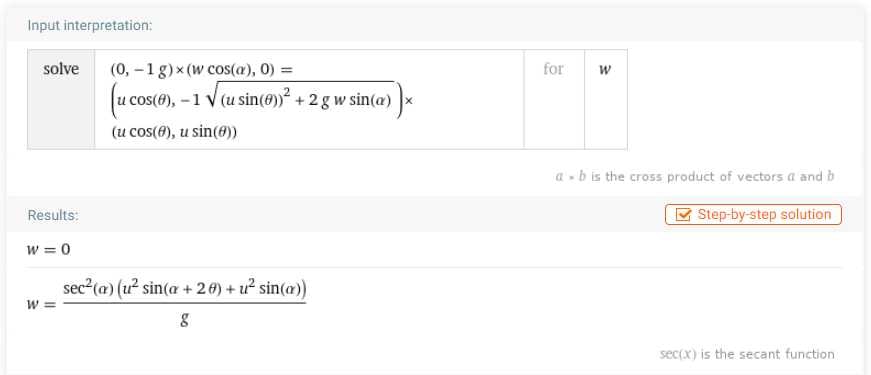
$$\vec{g}=(0,-g)$$ $$\vec{R}=(w\cos\alpha,0)$$ $$\vec{u}=(u\cos\theta,u\sin\theta).$$Once again the horizontal component of velocity ##u_x=v_x=u\cos\theta## does not change but we will need equation 6 to obtain an expression for ##v_y##. For this we write the vertical height gained by the projectile as ##w\sin\alpha##. Then: $$v_y=-\sqrt{((u\sin\theta)^2-2gw\sin\alpha)}$$. Hence the overall vector entry for ##\vec{v}## will be: $$\vec{v}=\left(u\cos\theta,-\sqrt{((u\sin\theta)^2-2gw\sin\alpha)}\right).$$We may now proceed with submission of the vector equation on Wolfram Alpha.
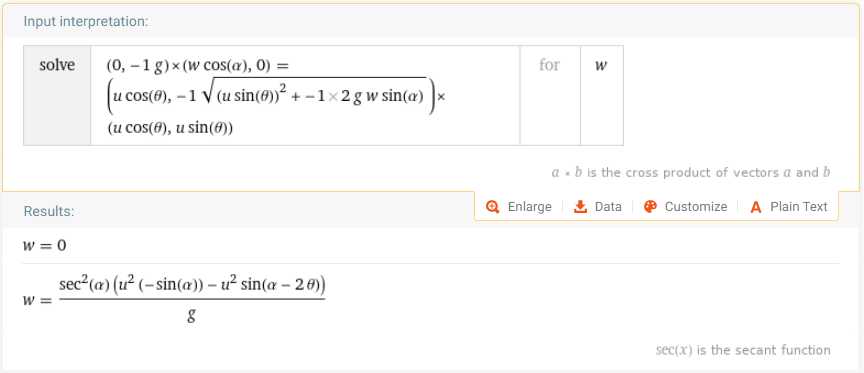
At first glance, the solution appears to be all negative, but the term ##-u^2\sin(\alpha-2\theta)## can be written as ##+u^2\sin(2\theta-\alpha)## and the reader may verify this as the correct expression for a range up a slope here.
It is true that Wolfram Alpha “chomps” through a lot of algebra to reach the above solution but if the reader cares to examine the ‘step-by-step’ solution, it will be clear that there is nothing particularly complicated about the process. Wolfram Alpha simply assures us that there won’t be any mistakes in the algebra leading to the range equation above. And that we can have every confidence in employing the vector equation as indicated since the results are the same as those obtained by more ‘conventional’ means.
It is worth noting that the determination of the range down a slope (rather than up) entails nothing more than a single sign change in the above vector equation:
Summary and Conclusion
This article has drawn extensively on J. Gibson Winans’s article describing the quaternion-based derivation of two equations that can be used in tandem to solve projectile problems. We have provided two demonstrations of the use thereof in the worked examples above and we hope that these ‘aperitifs’ will whet the reader’s appetite to try out the technique on other projectile problem(s) which may arise either in PF’s ‘homework help’ forums or from elsewhere. As mentioned earlier, readers are encouraged to share their experiences with us via the comment section for this article.
Acknowledgments
I would never have known anything at all about the vector cross-product equation (nor subsequently about the related quaternion equation) were it not for PF User @kuruman bringing the former to my attention in the article mentioned in the introduction above. He also contributed alternate derivations for both the vector dot product and the vector cross product.
During a lively correspondence with PF user @kuruman , he presented me with several different projectile motion problems for solution by various methods. This means that the theory presented in this article has been subjected to some stringent testing and (so far anyway) has not been found wanting.
Perhaps most importantly of all he raised a fundamental question relating to the physical meaning of the vector cross product.
PF User @TSny provided us with a meaningful answer to the above question by interpreting the vector cross product as torque per unit mass measured from the projectile launch point. He also raised important technicalities relating to the correct use of sign in the vector dot product.
Last but by no means least, I would like to expressly thank the American Association of Physics Teachers for kindly permitting me to quote significantly from the foundation reference – namely the American Journal of Physics article on “Convenient Equations for Projectile Motion” by J.Gibson Winans. (see References section below). This Insights article owes its title to the theory quoted from that reference.
References
[1] | J.Gibson Winans. Convenient Equations for Projectile Motion: American journal of physics: Vol 29, no 9.https://aapt.scitation.org/doi/abs/10.1119/1.1937861?journalCode=ajp, February 1961. (Accessed on 06/17/2021). [ bib ] |
[2] | PF User Kuruman. How to Master Projectile Motion without Quadratics.https://www.physicsforums.com/insights/how-to-master-projectile-motion-without-quadratics/, November 2020. (Accessed on 06/17/2021). [ bib ] |
[3] | PF User Kuruman. How to Solve Projectile Motion Problems in One or Two lines.https://www.physicsforums.com/insights/how-to-solve-projectile-motion-problems-in-one-or-two-lines/, June 2021. (Accessed on 06/20/2021). [ bib ] |
[4] | Lumen Learning. Projectile Motion | Physics.https://courses.lumenlearning.com/physics/chapter/3-4-projectile-motion/. (Accessed on 06/20/2021). [ bib ] |
[5] | Sunil Kumar Singh. Projectile Motion on an Incline – Physics for K-12 – openstax cnx.https://cnx.org/contents/MymQBhVV@175.14:–TzKjCB@8/Projectile-motion-on-an-incline. (Accessed on 06/20/2021). [ bib ] |
[6] | Stephen Wolfram. Wolfram|alpha: Computational intelligence. https://www.wolframalpha.com/. (Accessed on 06/17/2021). [ bib ] |
BSc (Elec Eng) University of Cape Town, HDE University of South Africa
Maths and Science Tutor, Florida Park, Johannesburg
Research areas (personal interest): Hydrogen / Hydrogen-like spectra. Historical Maths.
Wikipdedia contributions: Ptolemy’s Theorem, Diophantus II.VIII, Continuous Repayment Mortgage








Thanks for your kind comment. AAPT (or their representatives) were very helpful – I think they were happy for a long-archived article in AJP to get some renewed attention. Certainly there was something of a process to be followed (as you would expect) but at the end of the day the permission granted was very generous in extent.
Nicely written! Great job!
How hard was it to get the AAPT to approve your use of their material?