Basis vectors — 80 discussions
-

Graduate Shauder basis for Hilbert spaces
Consider the Hilbert space on ##\mathbb C## of square integrable functions of one variable ##L^2(\mathbb R)##. As claimed in a recent thread in QM subforum, there exists a "good" Hilbert basis for it given by the set of Hermite functions defined on ##\mathbb R##. This set is countable hence...- cianfa72
- Thread
- Banach Basis vectors Hilbert spaces Orthonormal basis Vector spaces
- Replies: 0
- Forum: Topology and Analysis
-
Undergrad About the maximal extension of local charts on a manifold
I'm a bit confused by the conditions on the existence of coordinate basis given by Frobenius's theorem. Namely, let's take a n-dimensional smooth manifold and a set of n smooth vector fields defined on it. Suppose they are pointwise linearly independent and do commute each other (i.e. zero...- cianfa72
- Thread
- Basis vectors Coordinate chart Frobenius Manifold Topology
- Replies: 8
- Forum: Differential Geometry
-
Undergrad About the existence of Hamel basis for vector spaces
It is well known that a vector space always admits an algebraic (Hamel) basis. This is a theorem that follows from Zorn's lemma based on the Axiom of Choice (AC). Now consider any specific instance of vector space. Since the AC axiom may or may not be included in the underlying set theory...- cianfa72
- Thread
- Axioms Basis vectors Set theory Vector spaces Zfc
- Replies: 32
- Forum: Linear and Abstract Algebra
-
Undergrad How to calculate basis vectors from metric tensor (as a matrix)?
As I understand from my self-study (and I'm well aware I may be wrong, so please correct me and/or point me in the right direction etc if so), the metric tensor is more or less what describes the shape of a manifold. It's the fundamental object from which most things tend to be derived from...- Tachytaenius
- Thread
- Basis vectors Metric tensor
- Replies: 6
- Forum: Special and General Relativity
-

Undergrad Example of complete set of operators
I have a question about an example about the choice of the operators needed to describe a system, the text is reported below: "3D systems with ##H = (p_1^2+ p_2^2+ p_3^2)/(2m)## but no potential. Classically, the number of degrees of freedom is 6 corresponding to the six canonical variables xi...- alebruna
- Thread
- Basis vectors Example Free particle Operators on hilbert space Quantum phyics
- Replies: 11
- Forum: Quantum Interpretations and Foundations
-

High School How addition of vectors works if every force is quantized
Assuming two forces applied on an object in two vector one horizontal to the object and the other vertical, By vector addition the resulting vector would be in 45 degrees. (0,1) + (1,0) = (1,1) So the object acceleration direction would be as the following graph. But if the force that...- danielhaish
- Thread
- Basis vectors Error
- Replies: 20
- Forum: Quantum Physics
-
D
Undergrad Vector subspace and basis vectors in the context of data science
The book I am studying from presents vector subspace as an infinite collection of vectors in a vector space with the properties of additive and multiplicative closure and basis vectors as a way to characterize/write a subspace compactly. All the vectors in the subspace can be written as linear...- DumpmeAdrenaline
- Thread
- Basis vectors Data science
- Replies: 6
- Forum: Linear and Abstract Algebra
-
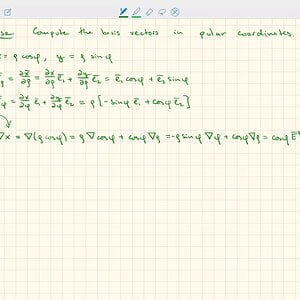
SH2372 General relativity (2X): Basis vectors in polar coordinates
- Orodruin
- Media item
- Basis vectors Polar coordinates
- Comments: 0
- Media category: Relativity
-
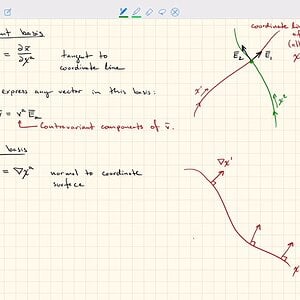
SH2372 General Relativity (2): Tangent and dual bases
- Orodruin
- Media item
- Basis vectors Tangent vector
- Comments: 0
- Media category: Relativity
-
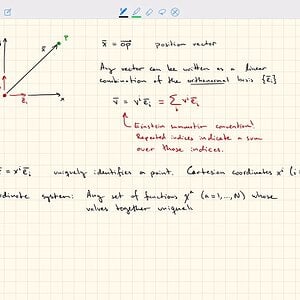
SH2372 General Relativity (1): Euclidean space and coordinate systems
- Orodruin
- Media item
- Basis vectors Coordinate systems Euclidean space
- Comments: 0
- Media category: Relativity
-

Undergrad Confusion between vector components, basis vectors, and scalars
There is an ambiguity for me about vector components and basis vectors. I think this is how to interpret it and clear it all up but I could be wrong. I understand a vector component is not a vector itself but a scalar. Yet, we break a vector into its "components" and then add them vectorially...- e2m2a
- Thread
- Basis Basis vectors Components Confusion Scalars Vector Vector components Vectors
- Replies: 4
- Forum: Beyond the Standard Models
-
K
Determine the area, calculate the basis vectors and determine the inner product
A coordinate system with the coordinates s and t in $$R^2$$ is defined by the coordinate transformations: $$ s = y/y_0$$ and $$t=y/y_0 - tan(x/x_0)$$ , where $$x_0$$ and $$y_0$$ are constants. a) Determine the area that includes the point (x, y) = (0, 0) where the coordinate system is well...- Karl Karlsson1
- Thread
- Area Basis Basis vectors Inner product Product Vectors
- Replies: 2
- Forum: Topology and Analysis
-
K
Calculate the dual basis and tangent basis vectors
a) Since ##tan(x/x_0)## is not defined for ##x=\pm\pi/2\cdot x_0## I assume x must be in between those values therefore ##-\pi/2\cdot x_0 < x < \pi/2\cdot x_0## and y can be any real number. Is this the correct answer on a)? b) I can solve x and y for s and t which gives me ##y=y_0\cdot s## and...- Karl Karlsson
- Thread
- Basis Basis vectors Dual Dual basis Tangent Vectors
- Replies: 3
- Forum: Calculus and Beyond Homework Help
-

Finding the Basis Vectors for a Coordinate System
To my understanding, to get the basis vectors for a given coordinate system (in this case being the elliptic cylindrical coordinate system), I need to do something like shown below, right? $$\hat{\mu}_x = \hat{\mu} \cdot \hat{x}$$ $$\hat{v}_z = \hat{v} \cdot \hat{z}$$ And do that for...- Athenian
- Thread
- Basis Basis vectors Coordinate Coordinate system System Vectors
- Replies: 6
- Forum: Calculus and Beyond Homework Help
-
S
High School Relating basis vectors at different points in a neighborhood
I'm reading a section on the derivative of a vector in a manifold. Quoting (the notation ##A^{\alpha}_{\beta'}## means ##\partial x^{\alpha}/\partial x^{\beta'}## - instead of using primed and unprimed variables, we use primed/unprimed indices to distinguish different bases): Now this "we know...- Shirish
- Thread
- Basis Basis vectors Points Vectors
- Replies: 5
- Forum: Differential Geometry
-

Graduate What Are Null Basis Vectors and Metric Signatures in Kruskal Coordinates?
On the way to Kruskal coordinates, Carroll introduces coordinates ##\left(v^\prime,u^\prime,\theta,\phi\right)## with metric equation$$ {ds}^2=-\frac{2{R_s}^3}{r}e^{-r / R_s}\left(dv^\prime du^\prime+du^\prime dv^\prime\right)+r^2{d\Omega}^2 $$ ##R_s=2GM## and we're using a ##-+++## signature...- George Keeling
- Thread
- Basis Basis vectors Metric Sean carroll Vectors
- Replies: 8
- Forum: Special and General Relativity
-
S
Undergrad Tangent space basis vectors under a coordinate change
I'm studying 'Core Principles of Special and General Relativity' by Luscombe - the chapter on tensors. Quoting: The book goes on to talk about a switch to the spherical coordinate system, in which ##\mathbf{r}## is specified as: $$\mathbf{r}=r\sin\theta\cos\phi\ \mathbf{\hat...- Shirish
- Thread
- Basis Basis vectors Change Coordinate Space Tangent tangent space Vectors
- Replies: 12
- Forum: Differential Geometry
-

Undergrad Feynman's Lectures volume III (Ch:8) -- Resolution of vector states
In the section 8-2 dealing with resolving the state vectors, we learn that |\phi \rangle =\sum_i C_i | i \rangle and the dual vector is defined as \langle \chi | =\sum_j D^*_j \langle j |Then, the an inner product is defined as \langle \chi | \phi \rangle =\sum_{ij} D^*_j C_i \langle j | i...- Ishika_96_sparkles
- Thread
- Basis vectors Feynman lectures Inner product Lectures Resolution State vector States Time evolution Vector Volume
- Replies: 4
- Forum: Quantum Physics
-
R
Undergrad The Levi-Civita Symbol and its Applications in Vector Operations
Hello all, I was just introduced the Levi-Civita symbol and its utility in vector operations. The textbook I am following claims that, for basis vectors e_1, e_2, e_3 in an orthonormal coordinate system, the symbol can be used to represent the cross product as follows: e_i \times e_j =... -

Undergrad Lie derivative of hypersurface basis vectors along geodesic congruence
Hello PF, here’s the setup: we have a geodesic congruence (not necessarily hypersurface orthogonal), and two sets of coordinates. One set, ##x^\alpha##, is just any arbitrary set of coordinates. The other set, ##(\tau,y^a)##, is defined such that ##\tau## labels each hypersurface (and...- Pencilvester
- Thread
- Basis Basis vectors Derivative Geodesic Lie derivative Vectors
- Replies: 15
- Forum: Special and General Relativity
-
S
Undergrad How do you derive those basis vectors in GR?
You may be familiar with how you can express a vector field as a linear combination of basis vectors like so: X = Xi∂i Now, I know that normally, the basis vectors ∂i can be derived by taking the derivatives of the position vector for the coordinate system with respect to all the axes like...- space-time
- Thread
- Basis Basis vectors Derive Gr Vectors
- Replies: 14
- Forum: Special and General Relativity
-
D
Undergrad Deriving tensor transformation laws
Hi, I'm worried I've got a grave misunderstanding. Also, throughout this post, a prime mark (') will indicate the transformed versions of my tensor, coordinates, etc. I'm going to define a tensor. $$T^\mu_\nu \partial_\mu \otimes dx^\nu$$ Now I'd like to investigate how the tensor transforms...- Daniel_C
- Thread
- Basis vectors deriving General relativity Laws Tensor Transformation
- Replies: 3
- Forum: Special and General Relativity
-
M
Prove that the standard basis vectors span R^2
Homework Statement I know how to approach this problem; however, I'm just confused as to why we consider that R^2 is a vector space over the field R, and not Q or any other field for this question? Standard basis vectors: e_1, e_2 or i,j- Mathematicsresear
- Thread
- Basis Basis vectors Span Standard Vectors
- Replies: 1
- Forum: Calculus and Beyond Homework Help
-

Undergrad How Are Basis Vectors Defined in Different Coordinate Systems?
hi. if I know how to convert coordinates from a system to cartesian system, then how can I find basevectors of that coordinatesystem? Is it possible that basevectors are different in different points(with different coordinates)? What is most general definition of basevectors? I tought it would...- olgerm
- Thread
- Basis Basis vectors Vectors
- Replies: 14
- Forum: Differential Geometry
-
M
Dot product and basis vectors in a Euclidean Space
Homework Statement I am asked to write an expression for the length of a vector V in terms of its dot product in an arbitrary system in Euclidean space. Homework EquationsThe Attempt at a Solution The dot product of a vector a with itself can be given by I a I2. Does that expression only apply...- Mathematicsresear
- Thread
- Basis Basis vectors Dot Dot product Euclidean Euclidean space Product Space Vectors
- Replies: 4
- Forum: Calculus and Beyond Homework Help
-
M
How Is the Derivative of Basis Vectors Computed in Polar Coordinates?
Homework Statement I am unsure as to how the partial derivative of the basis vector e_r with respect to theta is (1/r)e_theta in polar coordinates Homework EquationsThe Attempt at a Solution differentiating gives me -sin(theta)e_x+cos(theta)e_y however I'm not sure how to get 1/r.- Mathematicsresear
- Thread
- Basis Basis vectors Derivative Vectors
- Replies: 2
- Forum: Advanced Physics Homework Help
-
K
Undergrad Basis Vectors & Inner Product: A No-Nonsense Introduction
I read from this page https://properphysics.wordpress.com/2014/06/09/a-no-nonsense-introduction-to-special-relativity-part-6/ that the basis vectors are the canonical basis vectors in any coordinate system. This seems to be wrong, because if that was the case the metric would be the identity...- kent davidge
- Thread
- Basis Basis vectors Inner product Product Vectors
- Replies: 8
- Forum: Special and General Relativity
-
N
High School Tensor Product, Basis Vectors and Tensor Components
I am trying to figure how to get 1. from 2. and vice versa where the e's are bases for the vector space and θ's are bases for the dual vector space. 1. T = Tμνσρ(eμ ⊗ eν ⊗ θσ ⊗ θρ) 2. Tμνσρ = T(θμ,θν,eσ,eρ) My attempt is as follows: 2. into 1. gives T = T(θμ,θν,eσ,eρ)(eμ ⊗ eν ⊗ θσ ⊗ θρ)...- nigelscott
- Thread
- Basis Basis vectors Components Product Tensor Tensor product Vectors
- Replies: 2
- Forum: Linear and Abstract Algebra
-
P
High School Minkowski metric, scalar product, why the minus sign?
In Schutz's A First Course in General Relativity (second edition, page 45, in the context of special relativity) he gives the scalar product of four basis vectors in a frame as follows: $$\vec{e}_{0}\cdot\vec{e}_{0}=-1,$$...- peter46464
- Thread
- Basis vectors Metric Minkowski Product Scalar Scalar product Sign Special relativity
- Replies: 14
- Forum: Special and General Relativity
-

Calculate coefficients of expansion for vector y
Homework Statement Let v(0) = [0.5 0.5 0.5 0.5]T, v(1) = [0.5 0.5 -0.5 -0.5]T, v(2) = [0.5 -0.5 0.5 -0.5]T, and z = [-0.5 0.5 0.5 1.5]T. a) How many v(3) can we find to make {v(0), v(1), v(2), v(3)} a fully orthogonal basis? b) What are z's coefficients of expansion αk in the basis found in...- nacreous
- Thread
- Basis Basis vectors Coefficients Expansion Linear algebra Signal analysis Vector
- Replies: 5
- Forum: Calculus and Beyond Homework Help
-
C
Linear Algebra - Finding coordinates of a set
Homework Statement Find the coordinates of each member of set S relative to B. B = {1, cos(x), cos2(x), cos3(x), cos4(x), cos5(x)} S = {1, cos(x), cos(2x), cos(3x), cos(4x), cos(5x)} I am to do this using Mathematica software. Each spanning equation will need to be sampled at six separate...- cscott0001
- Thread
- Algebra Basis vectors Coordinates Linear Linear algebra Set Vector space
- Replies: 2
- Forum: Calculus and Beyond Homework Help
-

Basis of the intersection of two spaces
Homework Statement Consider two vector spaces ##A=span\{(1,1,0),(0,2,0)\}## and ##B=\{(x,y,z)\in\mathbb{R}^3 s.t. x-y=0\}##. Find a basis of ##A\cap B##. I get the solution but I also inferred it without all the calculations. Is my reasoning correct Homework Equations linear dependence...- Zero2Infinity
- Thread
- Basis Basis vectors Intersection Linear algebra Vector space
- Replies: 2
- Forum: Calculus and Beyond Homework Help
-

Find the basis of a kernel and the dimension of the image
Homework Statement Let ##n>1\in\, \mathbb{N}##. A map ##A:\mathbb{R}_{n}[x]\to\mathbb{R}_{n}[x]## is given with the rule ##(Ap)(x)=(x^n+1)p(1)+p^{'''}(x)## a)Proof that this map is linear b)Find some basis of the kernel b)Find the dimension of the image Homework Equations ##\mathbb{R}_{n}[x]##...- Matejxx1
- Thread
- Basis Basis vectors Dimension Image Kernel Linear algebra
- Replies: 1
- Forum: Calculus and Beyond Homework Help
-

Undergrad Wedge product of basis vectors
Is there a set of relationships for the wedge product of basis vectors as there are for the dot product and the cross product? i.e. e1*e1 = 1 e1*e2 = 0 e1 x e2 = e3- Kevin McHugh
- Thread
- Basis Basis vectors Product Vectors Wedge
- Replies: 4
- Forum: Linear and Abstract Algebra
-
S
Undergrad Original direction of force versus vector components
What happens to a mechanical force's real original direction i.e. when we divide it into components of basis vectors, which in turn change as per problem at hand (like gravity components at inclined plane ), how we arrive at correct physics by taking two/three arbitrary directions of our choice...- StruglingwithPhysics
- Thread
- Basis vectors Components Direction Force Nature Vector Vector components Vectors
- Replies: 7
- Forum: Mechanics
-
D
Undergrad How to find basis vectors for a+ ax^2+bx^4?
I want to find basis for a+ax^2+bx^4 belong to p4. I am getting the following result is it right? =>a(1+x^2) + b(x^4) => basis ={1+x^2, x^4} Is that right ? Please help me any help is appreciated.- DhineshKumar
- Thread
- Basis Basis vectors Vectors
- Replies: 3
- Forum: Linear and Abstract Algebra
-
M
Graduate Covariant and contravariant basis vectors /Euclidean space
I want ask another basic question related to this paper - http://www.tandfonline.com/doi/pdf/10.1080/16742834.2011.11446922 If I have basis vectors for a curvilinear coordinate system(Euclidean space) that are completely orthogonal to each other(basis vectors will change from point to point)...- meteo student
- Thread
- Basis Basis vectors Contravariant Coordinate systems Coordinate transformation Covariant Covariant vectors Space Vectors
- Replies: 11
- Forum: Differential Geometry
-
J
Undergrad Vector Analysis using Basis Vectors
Hi pf, Having some trouble with basis vectors for expanding a given vector in 3-D space. Any given vector in 3-D space can be given by a sum of component vectors in the form: V = e1V1 + e2V2 + e3V3 (where e1, e2 and e3 are the same as i, j and k unit vectors). Equation 1. I am happy with...- Jimmy87
- Thread
- Analysis Basis Basis vectors Vector Vector analysis Vectors
- Replies: 5
- Forum: Linear and Abstract Algebra
-
Z
Graduate Are photons really anti-correlated off their basis vectors?
The wiki page https://en.wikipedia.org/wiki/Bell's theorem states the following which I agree with: Suppose the two particles are perfectly anti-correlated—in the sense that whenever both measured in the same direction, one gets identically opposite outcomes, when both measured in opposite...- zincshow
- Thread
- Basis Basis vectors Photons Vectors
- Replies: 2
- Forum: Quantum Physics
-

Graduate Matrix Elements as images of basis vectors
I'm trying to understand the maths of QM from Shankar's book - Principles of Quantum Mechanics: On page 21 of that book, there is a general derivation that if we have a relation: |v'> = Ω|v> Where Ω is a operator on |v> transfroming it into |v'>, then the matrix entries of the operator can be...- askhetan
- Thread
- Basis Basis vectors Elements Images Matrix Vectors
- Replies: 9
- Forum: Linear and Abstract Algebra
-

Graduate Basis vectors of Minkowski space
Hi, I'm doing a first course in GR and have just found out that \eta_{ab} = g(\vec{e}_{a}, \vec{e}_{b}) = \vec{e}_{a} \cdot \vec{e}_{b} where g is a tensor, here taking the basis vectors of the space as arguments. I haven't seen this written explicitly anywhere but does this mean that...- sunrah
- Thread
- Basis Basis vectors Minkowski Minkowski space Space Vectors
- Replies: 11
- Forum: Special and General Relativity
-
D
Graduate SR & Lorentz Scalar Fields: Covariant Diff. & Wave Amplitude
Hi. In GR , covariant differentiation is used because the basis vectors are not constant. But , what about in SR ? If the basis vectors are not Cartesian then they are not constant. Does covariant differentiation exist in SR ? And are for example spherical polar basis vectors which are not...- dyn
- Thread
- Basis Basis vectors Fields Lorentz Scalar Scalar fields Sr Vectors
- Replies: 3
- Forum: Special and General Relativity
-
R
Graduate How Many Basis Vectors in Hilbert Space?
What is the dimensionality, N, of the Hilbert space (i.e., how many basis vectors does it need)? To be honest I am entirely lost on this question. I've heard of Hilbert space being both finite and infinite so I'm not sure as to a solid answer for this question. Does the Hilbert space need 4...- RyanUSF
- Thread
- Basis Basis vectors Hilbert Hilbert space Physics Quantum Space Vectors
- Replies: 14
- Forum: Quantum Physics
-
S
Figuring out Bravais lattice from primitive basis vectors
Homework Statement Given that the primitive basis vectors of a lattice are ##\mathbf{a} = \frac{a}{2}(\mathbf{i}+\mathbf{j})##, ##\mathbf{b} = \frac{a}{2}(\mathbf{j}+\mathbf{k})##, ##\mathbf{c} = \frac{a}{2}(\mathbf{k}+\mathbf{i})##, where ##\mathbf{i}##, ##\mathbf{j}##, and ##\mathbf{k}## are...- spaghetti3451
- Thread
- Basis Basis vectors bravais lattice Lattice Primitive Vectors
- Replies: 9
- Forum: Advanced Physics Homework Help
-
M
Graduate Classifications of basis vectors
Hello every one , in this pic i just printed ( Tensors_The Mathematics of Relativity Theory and Continuum Mechanics by Anadijiban Das ) here the author classifies the basis into 3 types 1- is the general basis (non-holomonic ) , 2- coordinate basis ( holomonic ),3- orthonormal basis ( non-...- mikeeey
- Thread
- Basis Basis vectors Vectors
- Replies: 7
- Forum: Differential Geometry
-
M
Undergrad A Bit Confused About Polar Basis Vectors
Let me say from the beginning I'm not talking about the non-coordinate unit vectors for polar coordinates. I'm talking about basis vectors. Let me just ask it as boldly as possible: how does one use these basis vectors in order to describe a vector? I know they are different at every point, so...- MrBillyShears
- Thread
- Basis Basis vectors Bit Confused Polar Vectors
- Replies: 3
- Forum: Differential Geometry
-

Graduate Confusion about basis vectors and matrix tensor
In "A Student's Guide to Vectors and Tensors" by Daniel Fleisch, I read that the covariant metric tensor gij=ei°ei (I'm leaving out the → s above the e's) where ei and ei are coordinate basis vectors and ° denotes the inner product, and similarly for the contravariant metric tensor using dual...- nomadreid
- Thread
- Basis Basis vectors Confusion Matrix Tensor Vectors
- Replies: 2
- Forum: Linear and Abstract Algebra
-
E
Graduate Why Can't Polar Basis Vectors Be Defined as Unit Vectors?
I'd like to understand why i cannot seem to be able to define unit polar basis vectors. Let me explain: We have our usual polar coordinates relation to Cartesian: x = r cosθ ; y = r sinθ if I define \hat{e_{r}}, \hat{e_{\vartheta}} as the polar basis vectors, then they should be...- epovo
- Thread
- Basis Basis vectors Polar Vectors
- Replies: 1
- Forum: Differential Geometry
-
B
Multiplying matrix units and standard basis vectors
Hello all, I don't have a question on homework specifically, but I need clarification on something I'm reading in the textbook. I will be starting an abstract algebra class in the spring and it's been quite a few years since I've had linear algebra, so I'll be reviewing that material before the...- bekkilyn
- Thread
- Basis Basis vectors Matrix Standard Units Vectors
- Replies: 3
- Forum: Calculus and Beyond Homework Help
-
H
Graduate Coordinate and dual basis vectors and metric tensor
I have been reading an introductory book to General Relativity by H Hobson. I have been following it step by step and now I am stuck. It is stated in the book that: "It is straightforward to show that the coordinate and dual basis vectors themselves are related... "ea = gabeb ..." I have...- Halaaku
- Thread
- Basis Basis vectors Coordinate Dual Dual basis Metric Metric tensor Tensor Vectors
- Replies: 9
- Forum: Special and General Relativity