Coordinate transformation — 96 discussions
-

Undergrad About the notion of non-standard inertial frame
I had a DM with @PAllen about the notion of non-standard inertial frame. Let's consider a (global) inertial frame in the context of flat spacetime. Apply now to it a general transformation of spatial coordinates alone. Such a transformation yields a frame that is no longer inertial. Although...- cianfa72
- Thread
- Coordinate system Coordinate transformation Frame of reference Inertial frame Special relativity
- Replies: 22
- Forum: Special and General Relativity
-
J
Undergrad Electromagnetic field in different reference frames
Suppose there are two reference frames. One is rotating with respect to another with rotational velocity ##\omega##. Now if in one of the reference frames the vector potential is $$(1, 0, 0, 0)$$ then in the other reference frame it will be $$(\sqrt{1-(\omega r)^2}, 0, \omega r, 0)$$. Now in...- Jokar
- Thread
- Coordinate transformation Electromagnetism Special relativity
- Replies: 23
- Forum: Special and General Relativity
-

Graduate Inferring coordinate change from the form of the metric
In Dirac's discussion of gravitational waves ("GTR", Chap. 33), he is working in the case where ##g_{\mu\nu}## are plane waves: waves moving in one direction only. In this case, ##g_{\mu\nu}## is a function of the single variable ##l_\sigma x^\sigma##. Here ##l_\sigma## is the wave vector, and...- Kostik
- Thread
- Coordinate transformation Metric tensor Plane waves
- Replies: 10
- Forum: Special and General Relativity
-
G
Undergrad Coordinate transformation for isotropy
The following question struck me by accident. Would appreciate to let me know the flaw in my logic, no need to deviate from this approach. We know that on small-scale, experiment such as dropping ball from some height to the earth tells us that space is non-isotropic, because of preferred...- gionole
- Thread
- Coordinate transformation
- Replies: 7
- Forum: Beyond the Standard Models
-

High School How to find the infinitesimal coordinate transform along a hyperbola?
I've been told that the infinitesimal change in coordinates x and y as you rotate along a hyperbola that fits the equation b(dy)^2-a(dx)^2=r takes the form δx=bwy and δy=awx, where w is a function of the angle of rotation (I'm pretty sure it's something like sinh(theta) but it wasn't clarified...- Sciencemaster
- Thread
- Angle Coordinate transformation Hyperbola Infinitesimal Rotation
- Replies: 1
- Forum: Differential Geometry
-
S
Undergrad Is a Gravitational Field Real or Just a Coordinate Transformation Artifact?
I'm studying Susskind's GR TTM book, in which he gives a nice explanation of why differential geometry is needed for GR. But there is one gap that I want to fill. The argument is: through a thought experiment, it seems that a uniform gravitation field can be seen as an artifact of going from an...- Shirish
- Thread
- Coordinate transformation Curvature Gravitational field
- Replies: 40
- Forum: Special and General Relativity
-
J
Switching reference frames between two intersecting lines
I got no problem with the arithmetic and solving it, finding the intersection of 2 lines is nothing, but I decided to play around with the problem and explore it more and ran into a strange problem, why can't I shift the X axis up? Let me explain. The problem can be set up from 2 different...- John3509
- Thread
- Coordinate transformation Reference frames
- Replies: 10
- Forum: Introductory Physics Homework Help
-
J
Graduate Papapetrou transformation: Conditions to be satisfied to achieve transformation
I'm looking at the Papapetrou transformation in Ch. 6, ##\S 52## of Chandrasekhar's book. He cf's Ch. 2, ##\S##11.I understand Ch. 2, ##\S##11. There he considers a coordinate transformation, \begin{align*} {x'}^1 = \phi (x^1,x^2) \qquad \text{and} \qquad {x'}^2 = \psi (x^1,x^2) \end{align*}...- julian
- Thread
- Coordinate transformation
- Replies: 1
- Forum: Special and General Relativity
-

Graduate Infinitesimal Coordinate Transformation and Lie Derivative
I need to prove that under an infinitesimal coordinate transformation ##x^{'\mu}=x^\mu-\xi^\mu(x)##, the variation of a vector ##U^\mu(x)## is $$\delta U^\mu(x)=U^{'\mu}(x)-U^\mu(x)=\mathcal{L}_\xi U^\mu$$ where ##\mathcal{L}_\xi U^\mu## is the Lie derivative of ##U^\mu## wrt the vector...- Baela
- Thread
- Coordinate Coordinate transformation Derivative Diffeomorphism Differential geometry Infinitesimal Lie derivative Transformation
- Replies: 1
- Forum: Differential Geometry
-
O
Coordinate transformation into a standard flat metric
I started by expanding ##dx## and ##dt## using chain rule: $$dt = \frac{dt}{dX}dX+\frac{dt}{dT}dT$$ $$dx = \frac{dx}{dX}dX+\frac{dx}{dT}dT$$ and then expressing ##ds^2## as such: $$ds^2 =...- offscene
- Thread
- Coordinate Coordinate transformation Flat General relativity Metric Special relativity Standard Transformation
- Replies: 3
- Forum: Advanced Physics Homework Help
-
Coordinate Transformation (multivariable calculus)
My Progress: I tried to perform the coordinate transformation by considering a general function ##f(\mathbf{k},\omega,\mathbf{R},T)## and see how its derivatives with respect all variable ##(\mathbf{k},\omega,\mathbf{R},T)## change: $$ \frac{\partial}{\partial\omega} f =...- luqman
- Thread
- Calculus Classical mechanics Coordinate Coordinate transformation Coordinate transformations Electromagnetic field Multivariable calculus Quanfum field theory Transformation
- Replies: 1
- Forum: Advanced Physics Homework Help
-
Undergrad Coord Transform in de Sitter Space: Phys Significance &Linearity?
Could one derive a set of coordinate transformations that transforms events between different reference frames in the de Sitter metric using the invariant line element, similar to how the Lorentz Transformations leave the line element of the Minkowski metric invariant? Would these coordinate...- Sciencemaster
- Thread
- Coordinate Coordinate transformation Coordinate transformations General relativity Line element Lorentz transformations Space Transformation
- Replies: 5
- Forum: Special and General Relativity
-
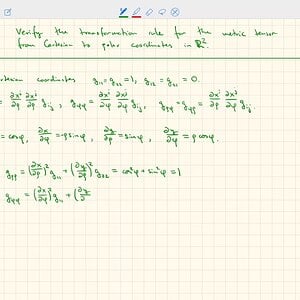
SH2372 General Relativity (7X): Coordinate transformation of metric components
- Orodruin
- Media item
- Coordinate transformation Metric tensor
- Comments: 0
- Media category: Relativity
-

Undergrad What Are the Uncommon Coordinate Systems in Physics Beyond the Basics?
I have come across Cartesian, Polar, Cylindrical & Spherical Coordinate Systems so far and was wondering if someone could tell me which are the uncommon systems used in physics which everyone says that they exist but no one explicitly mentions. Is there a "standard reference" or are they just...- Falgun
- Thread
- Coordinate Coordinate geometry Coordinate systems Coordinate transformation Physics Systems
- Replies: 16
- Forum: Classical Physics
-

Diagonalizing a metric by a coordinate transformation
I posted a thread yesterday and I think that I did not formulated it properly. So I have a metric ##{ds}^{2}=-{dt}^{2}+{dx}^{2}+2{a}^2(t)dxdy+{dz}^{2}## I was asked to find the the coordinate transformation so that I can get a diagonalized metric. so what I've done is I assumed a coordinate...- Lilian Sa
- Thread
- Coordinate Coordinate transformation Metric Transformation
- Replies: 12
- Forum: Advanced Physics Homework Help
-
Diagonalizing a metric by a coordinate transformation
hey there :) So I had a homework, and I was asked to diagonalize the metric ##{ds}^2=-{dt}^2+{dx}^2+2a^2(t)dxdy+{dz}^2## and to find the coordinate transformation for the coordinates of the new metric. so I found the coordinate transformation but the lecturer said that what I found is a...- Lilian Sa
- Thread
- Coordinate Coordinate transformation Metric Transformation
- Replies: 1
- Forum: Advanced Physics Homework Help
-

Graduate Understanding Coordinate Transformation of a Tensorial Relation
Let us suppose we have a covariant derivative of a contravariant vector such as $$\nabla_{\mu}V^{\nu}=\partial_{\mu}V^{\nu} + \Gamma^{\nu}_{\mu \lambda}V^{\lambda}$$ If ##\Delta_{\mu}V^{\nu}## is a (1,1) Tensor, it must be transformed as $$\nabla_{\bar{\mu}}V^{\bar{\nu}} = \frac{ \partial...- Arman777
- Thread
- Coordinate Coordinate transformation Relation Transformation
- Replies: 17
- Forum: Special and General Relativity
-
K
Calculating Angle Between E-Field and Current Vectors in Anisotropic Mat.
In a certain anisotropic conductive material, the relationship between the current density ##\vec j## and the electric field ##\vec E## is given by: ##\vec j = \sigma_0\vec E + \sigma_1\vec n(\vec n\cdot\vec E)## where ##\vec n## is a constant unit vector. i) Calculate the angle between the...- Karl Karlsson
- Thread
- Angle Angle between vectors Anisotropic Coordinate transformation Current E-field Material Matrix Tensor Vector analysis Vectors
- Replies: 3
- Forum: Calculus and Beyond Homework Help
-
S
Infinitesimal coordinate transformation of the metric
I kinda know how to do this problem, it is just that I hit a sign problem. If I take the partial derivative of the coordinate transformation with respect to ##x'^\mu##, I get writing it first in the inverse form, ##x^\alpha = x'^\alpha - \epsilon^\alpha## ##\frac{\partial x^\alpha}{\partial...- shinobi20
- Thread
- Coordinate Coordinate transformation Infinitesimal Metric Special relativity Tensor analysis Transformation
- Replies: 1
- Forum: Advanced Physics Homework Help
-
M
Transformation from de Sitter to flat spacetime coordinates
Let me begin by stating that I'm aware of the fact that this is a metric of de Sitter spacetime, aka I know the solution, my problem is getting there. My idea/approach so far: in the coordinates ##(u,v)## the metric is given by $$g_{\mu\nu}= \begin{pmatrix}1 & 0\\ 0 & -u^2\end{pmatrix}.$$ The...- Markus Kahn
- Thread
- Coordinate transformation Coordinates Flat General relativity Metric Spacetime Transformation
- Replies: 2
- Forum: Advanced Physics Homework Help
-
T
Undergrad Why Are Coordinates in General Relativity Independent?
I can see that by the tensor transformation law of the Kronecker delta that ##\frac{\partial x^a}{\partial x^b}=\delta^a_b## And thus coordinates must be independent of each other. But is there a more straightforward and fundamental reason why we don’t consider dependent coordinates? Is it...- TomServo
- Thread
- Coordinate transformation Coordinates General relaivity Gr Independent Tensor algebra
- Replies: 7
- Forum: Special and General Relativity
-
V
Undergrad Geodesics under coordinate transformation
I will start with an example. Consider components of metric tensor g' in a coordinate system $$ g'= \begin{pmatrix} xy & 1 \\ 1 & xy \\ \end{pmatrix} $$ We can find a transformation rule which brings g' to euclidean metric g=\begin{pmatrix} 1 & 0 \\ 0 & 1\\ \end{pmatrix}, namely...- VladZH
- Thread
- Coordinate Coordinate transformation Geodesics Transformation
- Replies: 23
- Forum: Differential Geometry
-
J
Formulas for Rotation and Translation
Given the coordinates ##P = (3,4)## , find the coordinates of ##P"(x',y')## when the origin is shifted to (1, –2), and the axes are rotated by 90° in the clockwise direction. I attempted to solve this problem using the following formulas : ##x = X + h## and ##y = Y + k## for translation of the...- JC2000
- Thread
- Analytic geometry Coordinate geometry Coordinate transformation Formulas Rotation Translation
- Replies: 16
- Forum: Precalculus Mathematics Homework Help
-
J
Graduate Torque coordinate transformation
Hi all, I am currently working on a creating a mathematical model of a longboard and am in need of advice. The pictures describe the sitaution. Side view Top view Back view The pictures depict a simplified longboard - the brown line is the deck and the black lines represent the...- Jan Grossmann
- Thread
- Coordinate Coordinate transformation Torque Transformation
- Replies: 6
- Forum: Mechanics
-

Undergrad Explaining Coordinate Rotation in Arfken & Weber Chapter 1
In Mathematical Methods for Physicists, 6th Edition, by Arfken and Weber, Chapter 1 Vector Analysis, pages 8-9, the authors make the following statement: "If Ax and Ay transform in the same way as x and y, the components of the general two-dimensional coordinate vector r, they are the...- sams
- Thread
- Coordinate Coordinate transformation Rotation Vector analysis
- Replies: 1
- Forum: General Math
-
E
Graduate Vec norm in polar coordinates differs from norm in Cartesian coordinates
I am really confused about coordinate transformations right now, specifically, from cartesian to polar coordinates. A vector in cartesian coordinates is given by ##x=x^i \partial_i## with ##\partial_x, \partial_y \in T_p \mathcal{M}## of some manifold ##\mathcal{M}## and and ##x^i## being some...- Emil_M
- Thread
- Cartesian Cartesian coordinates Coordinate transformation Coordinates Euclidean geometry Metric Norm Polar Polar coordinates Tensor
- Replies: 47
- Forum: Special and General Relativity
-

High School Proving Linearity in Coordinate Transformation: A Mathematical Approach
This is intuitively very simple problem but I am unable to complete it with Mathematical rigor. Here is the deal: A coordinate system $(u,v,w,p)$ in which the metric tensor has the following non-zero components, $g_{uv}= g_{ww}=g_{pp}=1$. Find the coordinate transformation between $(u,v,w,p)$...- shahbaznihal
- Thread
- Coordinate Coordinate transformation Transformation
- Replies: 6
- Forum: Differential Geometry
-

Undergrad Transforming to Local Inertial Coordinates
I've been playing around a bit with the Kerr orbit program I wrote, and have been thinking about ways to set the initial conditions. One thing I'd like to be able to do is specify a launch from some event in terms that would be convenient for an observer at that event with some given...- Ibix
- Thread
- Coordinate transformation Coordinates General relaivity Inertial Local
- Replies: 5
- Forum: Special and General Relativity
-
Q
Undergrad Coordinate transformation - Rotation
How author derives these old basis unit vectors in terms of new basis vectors ? Please don't explain in two words. \hat{e}_x = cos(\varphi)\hat{e}'_x - sin(\varphi)\hat{e}'_y \hat{e}_y = sin(\varphi)\hat{e}'_x + cos(\varphi)\hat{e}'_y- Quanta
- Thread
- Coordinate Coordinate transformation Coordinate transformations Rotation Transformation
- Replies: 10
- Forum: Differential Geometry
-
H
Graduate Correct coordinate transformation from Poincare-AdS##_3## to global AdS##_3##
Consider the transformation from Poincare-AdS##_3## geometry to global AdS##_3## geometry: $$ds^{2} = \frac{dr^{2}}{r^{2}} + r^{2}g_{\alpha\beta}dx^{\alpha}dx^{\beta}, \qquad \text{Poincare-AdS$_3$}$$ $$ds^{2} = \frac{dr^{2}}{r^{2}} + r^{2}\left(-dt^{2}+r^{2}d\phi^{2}\right), \qquad...- highflyyer
- Thread
- Coordinate Coordinate transformation Global Transformation
- Replies: 3
- Forum: Special and General Relativity
-

Natural basis and dual basis of a circular paraboloid
Hi everyone!I'm trying to obtain the natural and dual basis of a circular paraboloid parametrized by: $$x = \sqrt U cos(V)$$ $$y = \sqrt U sen(V)$$ $$z = U$$ with the inverse relationship: $$V = \arctan \frac{y}{x}$$ $$U = z$$ The natural basis is: $$e_U = \frac{\partial \overrightarrow{r}}...- Adrian555
- Thread
- Basis Circular Coordinate systems Coordinate transformation Differential geometry Dual Dual basis Natural Paraboloid Tensor calculus
- Replies: 2
- Forum: Calculus and Beyond Homework Help
-

Undergrad Metric transformation under coordinate transformation
In the second volume, Field Theory, of popular series of Theoretical Physics by Landau-Lifschitz are given following equations as in attached file from the book. Here is considered metric change under coordinate transformation. How is the new, prime metric expressed in original coordinates is...- Tursinbay
- Thread
- Coordinate Coordinate transformation Metric Transformation
- Replies: 9
- Forum: Special and General Relativity
-

Handling Rotational Degrees of Freedom in Coordinate Transformations
I am trying to analyse response of a dynamic system. The source disturbance is about x,y,theta (rotation about x ) & Phi of one coordinate system (red coloured coordinate system in the attached figure). I need to get the response in another coordinate system ( green coloured coordinate system...- chinmay
- Thread
- Coordinate Coordinate transformation Transformation
- Replies: 1
- Forum: Mechanical Engineering
-

Graduate How to Calculate the Partial Derivative of a Vector in Spherical Coordinates?
I have the following equations: \left\{ \begin{array}{l} x = \sin \theta \cos \varphi \\ y = \sin \theta \cos \varphi \\ z = \cos \theta \end{array} \right. Assume \vec r = (x,y,z), which is a 1*3 vector. Obviously, x, y, and z are related to each other. Now I want to calculate \frac{{\partial... -

Undergrad Coordinate transformation of a vector of magnitude zero
Is there some geometry in which a coordinate transformation of a vector of magnitude zero transforms to a vector that does not have a zero magnitude? Since the formula for the magnitude of a vector is √(x12+x22+...xn2), I can see no way for it to have magnitude zero unless every component is...- Battlemage!
- Thread
- Coordinate Coordinate transformation Magnitude Transformation Vector Zero
- Replies: 3
- Forum: Linear and Abstract Algebra
-

Undergrad Jacobian matrix generalization in coordinate transformation
hi, I always see that jacobian matrix is derived for just 2 dimension ( ıt means 2x2 jacobian matrix) in books while ensuring the coordinate transformation. After that kind of derivation, books say that you can use same principle for higher dimensions. But, I really wonder if there is a proof... -
D
Graduate What is the trace of a second rank covariant tensor?
What is the trace of a second rank tensor covariant in both indices? For a tensor covariant in one index and contravariant in another ##T^i_j##, the trace is ##T^k_k## but what is the trace for ##T_{ij}## because ##T_{kk}## is not even a tensor?- dwellexity
- Thread
- Coordinate transformation Covariant Gravitation rank Tensor Tensors Trace
- Replies: 4
- Forum: Astronomy, Astrophysics, Cosmology
-
W
Find the coordinate transformation given the metric
Homework Statement Given the line element ##ds^2## in some space, find the transformation relating the coordinates ##x,y ## and ##\bar x, \bar y##. Homework Equations ##ds^2 = (1 - \frac{y^2}{3}) dx^2 + (1 - \frac{x^2}{3}) dy^2 + \frac{2}{3}xy dxdy## ##ds^2 = (1 + (a\bar x + c\bar y)^2) d\bar...- Whitehole
- Thread
- Coordinate Coordinate transformation General relativity Metric Tensor analysis Transformation
- Replies: 4
- Forum: Advanced Physics Homework Help
-
J
Graduate How to Transform Angular Velocity Vector of a Satellite from ECI to LVLH System?
Hi.. I am new to this forum and not sure whether this is the right place to ask for a help. I have to transform angular velocity vector of a satellite from Earth Centered Inertial (ECI) coordinate system to Local Vertical Local Horizontal(LVLH) system. How can I do that..? Any help appreciated..- johnsnow
- Thread
- Coordinate Coordinate transformation Transformation
- Replies: 1
- Forum: Astronomy, Astrophysics, Cosmology
-
M
Graduate Covariant and contravariant basis vectors /Euclidean space
I want ask another basic question related to this paper - http://www.tandfonline.com/doi/pdf/10.1080/16742834.2011.11446922 If I have basis vectors for a curvilinear coordinate system(Euclidean space) that are completely orthogonal to each other(basis vectors will change from point to point)...- meteo student
- Thread
- Basis Basis vectors Contravariant Coordinate systems Coordinate transformation Covariant Covariant vectors Space Vectors
- Replies: 11
- Forum: Differential Geometry
-
T
Undergrad Coordinate transformation from spherical to rectangular
Iam having trouble understanding how one arrives at the transformation matrix for spherical to rectangular coordinates. I understand till getting the (x,y,z) from (r,th ie., z = rcos@ y = rsin@sin# x = rsin@cos# Note: @ - theta (vertical angle) # - phi (horizontal angle) Please show me how...- TheArun
- Thread
- Coordinate Coordinate transformation Rectangular Spherical Spherical coordinates Transformation
- Replies: 14
- Forum: Differential Geometry
-
S
Nonlinear coordinate transformation
Homework Statement Evening all, I'm trying to solve the 2-D diffusion equation in a region bounded by y = m x + b, and y = -m x -b. The boundary condition makes it complicated to work with numerically, and I recall a trick that involves a coordinate transformation so that y = m x + b, and y =...- shawnstrausser
- Thread
- Coordinate Coordinate transformation Nonlinear Transformation
- Replies: 1
- Forum: Calculus and Beyond Homework Help
-
S
Graduate Nonlinear coordinate transformation
Evening all, I'm trying to solve the 2-D diffusion equation in a region bounded by y = m x + b, and y = -m x -b. The boundary condition makes it complicated to work with numerically, and I recall a trick that involves a coordinate transformation so that y = m x + b, and y = -m x -b are mapped...- shawnstrausser
- Thread
- Coordinate Coordinate transformation Nonlinear Transformation
- Replies: 1
- Forum: Linear and Abstract Algebra
-
W
Coordinate Transformation for Projectile Motion Calculations
Homework Statement I'm trying to find the direction and magnitude of Earth's gravity on some projectile. The question states that I can ignore z, and that the origins of the x and y axes should be on the surface of the planet. I should then use Newton's law of Gravity to find the direction and...- whatisreality
- Thread
- Coordinate Coordinate transformation Transformation
- Replies: 6
- Forum: Precalculus Mathematics Homework Help
-
9
Finding roll, pitch and yaw angles
Homework Statement I have three angles that relate the sensory body frame to the Earth centered Earth fixed frame: roll_ecef, pitch_ecef, yaw_ecef I have the longitude and latitude. Find the roll, pitch and yaw angles that relate the sensor body frame to the local North East Down frame...- 9988776655
- Thread
- Angles Coordinate transformation Pitch Roll
- Replies: 1
- Forum: Engineering and Comp Sci Homework Help
-
9
Graduate Coordinate transformation - NED and ECEF frames
Hi, I have a reference device that outputs euler angles, which are angles that relate the sensor body frame to the north east down frame. These angles are called pitch roll and yaw. The sensor is an accelerometer. I know how to get the rotation matrix that will put accelerations from the...- 9988776655
- Thread
- Coordinate Coordinate transformation Coordinate transformations Euler Frame Frame of reference Frames Transformation Transformations
- Replies: 2
- Forum: Differential Geometry
-
E
Bases and Coordinates: B1 and B2 for [R][/3] - Homework Statement
Homework Statement Let B1={([u][/1]),([u][/2]),([u][/3])}={(1,1,1),(0,2,-1),(1,0,2)} and B2={([v][/1]),([v][/2]),([v][/3])}={(1,0,1),(1,-1,2),(0,2,1)} a) Show that B1 is a basis for [R][/3] b) Find the coordinates of w=(2,3,1) relative to B1 c)Given that B2 is a basis for [R[/3], find...- Eleni
- Thread
- Bases Basis Coordinate Coordinate transformation Coordinates Linear algebra Matrices Matrix Transition matrix Vectors
- Replies: 3
- Forum: Calculus and Beyond Homework Help
-
D
How Do Coordinate Transformations Work Between Different Systems?
Homework Statement Transform the coordinates from the red c-system to the blue system. (Picture) Homework Equations Using(X Y) for the red cartesian system and (x y) for the blue system The Attempt at a Solution The solution to this problem gives x=Xcos▼ + Ysin▼ y=-Xsin▼+Ycos▼ Im not sure...- diredragon
- Thread
- Coordinate Coordinate system Coordinate transformation Transformation
- Replies: 20
- Forum: Precalculus Mathematics Homework Help
-
C
Graduate 3D Coordinate transformation and Euler Angles
Hello, I'm running a galaxy formation simulation. The output specifies the coordinates in (x, y, z) of all the particles in a galaxy, which usually fall in a disk. The orientation of the disk depends on the initial conditions, but it is generally not aligned with any of the coordinate axes...- clandarkfire
- Thread
- 3d Angles Coordinate Coordinate transformation Euler Euler angles Transformation
- Replies: 4
- Forum: Beyond the Standard Models
-
&
Graduate Coordinate charts and change of basis
So I know that this involves using the chain rule, but is the following attempt at a proof correct. Let M be an n-dimensional manifold and let (U,\phi) and (V,\psi) be two overlapping coordinate charts (i.e. U\cap V\neq\emptyset), with U,V\subset M, covering a neighbourhood of p\in M, such that...- "Don't panic!"
- Thread
- Basis Change Change of basis Charts Coordinate Coordinate transformation Manifold Vector calculus
- Replies: 17
- Forum: Differential Geometry